انجام پروژه های حرفه ای مهندسی برق
طراحی به روش کنترل امپدانس برای بازوی ربات پوششی به منظور انجام کنترل نیرو و موقعیت
در این پروژه براساس مدل در نظر گرفته شده با سه درجه آزادی برای بازوی ربات پوششی که در تبادل نیرو با محیط اطراف خود می باشد نسبت به کنترل موقعیت و نیرو تحت عنوان کنترل امپدانس اقدام شده است. به منظور شبیه سازی از نرم افزار متلب استفاده شده است.
بیان مقدمه و اهداف پروژه (کنترل امپدانس بازوی پوششی)
ربات های پزشکی به دسته ای از بازوهای مکانیکی گفته می شود که توانایی شخص معلول یا بیمار را افزایش می دهد. این مسئله می تواند به صورت افزایش نیرو و یا افزایش دقت کار باشد. در این زمینه نیاز است تا یک سیستم کنترل بتواند وظیفه دریافت اطلاعات لازم، پردازش اطلاعات و عملیات کنترل بازو را انجام دهد. در حالت کلی این یک مسئله مکاترونیک می باشد که در آن انواع سنسورها از سنسور نیرو و موقعیت تا سنسورهای بکار رفته در پردازش تصویر دخالت دارند. در این پژوهش، مسئله اصلی بر روی کنترل این سیستم و البته مدل سازی صحیح کار می باشد. به منظور کنترل از روش کنترل امپدانس استفاده شده است.
توضیحات کلی
بازوهای مکانیکی و به طور کلی سیستم های رباتیک دارای دینامیک غیرخطی می باشند. این دینامیک غیرخطی به جهت ویژگی هایی که در مقالات و کتاب های مرجع مورد بررسی قرار گرفته دارای ویژگی هایی می باشد. ویژگی های مدل سیستم رباتیک باعث می شود تا بتوان آن را در یک مدل دینامیکی کلی نمایش داد. مدل دینامیکی بازوهای مکانیکی بصورت زیر می باشد.
")
نمایش مدل کلی بازوهای مکانیکی
روش های کنترل مختلف برمبنای این مدل غیرخطی برای بازوهای مکانیکی پیشنهاد می شود که هر کدام بنابر اهداف مورد نظر در سیستم پیاده سازی می شود. معمول ترین روش در کنترل سیستم های رباتیک، کنترل برمبنای دینامیک معکوس (وارون) می باشد. اصل این روش همان خطی سازی فیدبک حالت می باشد که در مراجع غیرخطی معرفی شده است. روش های معمول دیگر همچون جبران ساز گرانشی ، روش های برمبنای کنترلرهای تناسبی انتگرالی یا تناسبی مشتقی که با روش جبران ساز گرانشی می توانند ترکیب شوند. سایر روش های پیشرفته جهت کنترل ربات های مکانیکی می تواند بصورت زیر باشد:
- روش بازگشت به عقب
- روش های تطبیقی
- روش های مقاوم
در این روش ها اصل بر افزودن ویژگی مقاوم بودن بر روی سیستم کنترل می باشد. در این بین روش های دیگری به منظور کنترل موقعیت و یا نیرو معرفی می شوند. این روش ها بصورت زیر معرفی می شوند:
- کنترل موقعیت
- کنترل نیرو
- کنترل امپدانس
روش کنترل امپدانس به عنوان یک روش ترکیبی که هم نیرو و هم موقعیت را در نظر می گیرد، معرفی می شود. در این روش اندافکتور ربات نسبت به تعقیب یک مسیر و یک پروفیل نیرو بکار برده می شود.
بیان الگوریتم کار
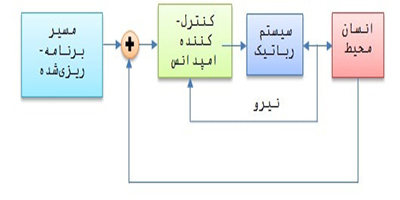
همانطور که بیان شد در این پروژه از روش کنترل امپدانس برای ردیابی موقعیت و نیرو استفاده شده است. در روش کنترل امپدانس نیرو و جابجایی (موقعیت) براساس هم تعریف می شوند. در این روش با معرفی یک متغیر میانی بصورت نسبت خطای نیرو بر خطای جابجایی نسبت به کنترل این نیرو اقدام می شود. در شکل زیر شماتیک روش کنترل امپدانس برای بازوی پزشکی (ربات پوششی) نمایش داده شده است. این روش می تواند در کنترل شیرهای الکترومکانیکی و بازوهای مکانیکی نیز مورد استفاده قرار بگیرد.
")
شماتیک روش کنترل امپدانس
حال در این مرحله با داشتن متغیر میانی مورد نظر بایستی یک روش کنترلی مناسب برای پایدارسازی سیستم بکار برد. در این پروژه با دریافت سیگنال خطای موقعیت و تعبیر آن به نیرو از شماتیک زیر یک روش برمبنای انتگرالی – تناسبی همراه با جبران ساز گرانشی می باشد، استفاده شده است.
")
شماتیک روش کنترل انتگرالی – تناسبی همراه با جبران ساز گرانشی
شبیه سازی پروژه
به منظور شبیه سازی سیستم از یک برنامه نویسی ترکیبی در محیط سیمولینک متلب استفاده شده است. در این روش با استفاده از کدنویسی بلوک های مدل دینامیکی، کنترل کننده، ژاکوبین و کنترل نیرو نسبت به شبیه سازی سیستم ربات – کنترلر اقدام شده است. البته نیاز است تا در مسیرهای مخصوص همچون سیگنال خطا ، سیگنال اندازه گیری و مرجع نیرو در جهت های x و y نسبت به تعریف اغتشاش و نیرو اقدام شود. در ادامه برخی از نتایج کار بیان شده اند.
")
نمایش مسیر پیموده شده توسط اندافکتور ربات به همراه مسیر مرجع
در این نمایش اندافکتور توانسته مسیر مرجع مورد نظر را با کمترین خطای ممکن تعقیب کند.
")
شکل موج سیگنال کنترلی وارد شده بر مفصل سوم
در این بازوی ربات پوششی سه درجه آزادی برای سیستم در نظر گرفته شده است. این سه درجه به ترتیب برای مفاصل اول تا سوم می باشند. به منظور کنترل سیستم نیاز است تا سه نیروی کنترلی بر روی هر کدام از این مفاصل اعمال شود. در این شکل نیروی وارد شده بر مفصل نهایی نمایش داده شده است. نیروی کنترلی مورد نظر دارای یک مقدار متوسط نهایی به منظور تعقیب مسیر می باشد. این نیرو در لحظات ابتدایی به جهت غلبه بر حالت های گذرا مقادیر بزرگتری دارد. با رسیدن سیستم به حالت ماندگار خود این نیرو نیز تا حد ممکن کاهش می یابد.
")
شکل موج نیروی وارد شده از طرف اندافکتور به محیط
همانطور که بیان شد، در کنترل امپدانس هدف در درجه اول تعقیب مسیر مرجع و در دجه دوم غلبه بر نیروی بیرونی وارد شده بر اندافکتور ربات می باشد. شکل بالا نمایش دهنده ی نیروی عکس العملی می باشد که در راستای X به محیط وارد می شود.
منبع : برق تِک