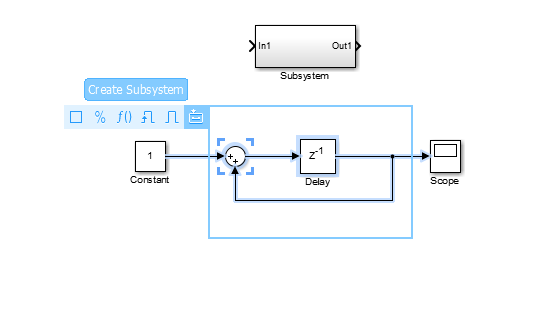
همانطور که یک مدل در اندازه و پیچیدگی افزایش می یابد، می توانید آن را با گروه بندی بلوک ها در زیر سیستم ها ساده کنید. زیرسیستم مجموعه ای از بلوک ها است که شما آنها را در یک بلوک زیرسیستم گروه بندی می کنید. استفاده از زیرسیستم ها: یک بلوک دیاگرام سلسله مراتبی را […]
انجام پروژه های حرفه ای مهندسی برق
مجموعه آموزش
در مجموعه آموزش، هدف بررسی تاپیک های مهم که مورد نیاز برای دانشجویان کارشناسی و ارشد گرایش های برق قدرت، کنترل، الکترونیک و مکاترونیک می باشد، است. در حال حاضر این مجموعه شامل بحث های زیر می باشد:
آموزش متلب
زیرمجموعه آموزش متلب شامل بخش های سیمولینک، کدنویسی و برنامه نویسی ترکیبی می باشد، در بخش سیمولینک، آموزش های مرتبط با محیط simulation متلب ارائه می گردد، اکثر شبیه سازی های قدرت در این بخش متمرکز می باشند که می توانند شامل الکترونیک قدرت، شبیه سازی سیستم های ریزشبکه، شبیه سازی منابع انرژی نو نظیر توربین های بادی، سلول خورشیدی، باتری، پیل سوختی، شبیه سازی انواع ماشین های الکتریکی و شبیه سازی سیستم های توزیع کوچک جهت مطالعات فیلتر باشد.
در بخش کدنویسی، آموزش های مرتبط با تابع نویسی و فراخوانی توابع ارائه می شود. به طور مشخص نیاز است تا دانشجویان مهندسی بتوانند در شبیه سازی های مرتبط با فرمول نویسی و یا مسائلی همچون پیاده سازی کنترل کننده ها و اجرای شبیه سازی های مرتبط با بهینه سازی، کنترل مقاوم و … نسبت به تابع نویسی در متلب اشراف داشته باشند.
نهایتا بخش برنامه نویسی ترکیبی که شامل ترکیب دو بخش بالایی می باشد، این نوع برنامه نویسی حول اهمیت اجرای برخی از بخش های شبیه سازی با کدنویسی در محیط سیمولینک می باشد. نرم افزار متلب با ارائه توابع قابل تعریف در محیط سیمولینک این امکان را به ما می دهد. دانشجویان مهندسی کنترل و قدرت می توانند از این امکان بیشترین بهره را در شبیه سازی های خود ببرند.
آموزش نرم افزار
در این بخش آموزش سایر نرم افزارها در دستور کار می باشد، سایر نرم افزارهای مهندسی برق شامل نرم افزار هومر، نرم افزار پی اسکد و گمز می باشد.
طراحی و پیاده سازی کنترلرها
این بخش بیشتر مختص دانشجویان کنترل می باشد که به آموزش و معرفی منابع برتر در طراحی سیستم های کنترل نظیر روش های خطی، غیرخطی، طراحی سیستم های کنترل مقاوم، بهینه سازی، طراحی انواع رویت گرها و آشنایی با سیستم های کنترل هوشمند می پردازد. دانشجویان مهندسی مکاترونیک و قدرت که نیاز به طراحی سیستم های کنترل دارند نیز می توانند از مطالب پیشرفته این بخش بهره ببرند.
ریزشبکه ها
این بخش به مطالعه مبحث اختصاصی ریزشبکه ها می پردازد. مطالعه ریزشبکه ها از نقطه نظر طراحی و پایداری ولتاژ و فرکانس و ارزیابی قابلیت اطمینان از موارد مورد نظر در این زیرمجموعه می باشد. ارائه این مبحث به جهت چرخش اکثر مطالب جدید در حوزه قدرت و کنترل به این مسئله می باشد.
میکروکنترلرها
در این زیرمجموعه به مطالعه مطالب آموزشی و معرفی مراجع برتر در زمینه میکروکنترلرها پرداخته می شود. میکروهای مورد مطالعه اغلب شامل میکروهای AVR، میکرو ARM و برنامه نویسی های مرتبط با این میکروها خواهد بود.

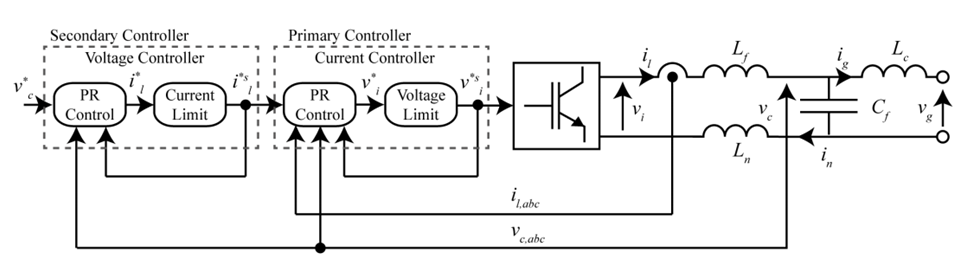
مقدمه چگونه باید توان حاصل از منابع تولید پراکنده را به شبکه انتقال داد ؟ این منابع توان اغلب خروجی DC دارند و در اولین گام نیاز است تا یک توان DC با ولتاژ تثبیت شده را بتوان از آنها کسب نمود. منابعی نظیر سلول های خورشیدی ، توربین های بادی ، پیل های سوختی […]
مقدمه ای بر تابع در متلب تابع مجموعه ای از دستورات است که با هم یک کار را انجام می دهند. در متلب توابع در فایل های جداگانه تعریف می شوند. نام فایل و تابع باید یکسان باشد. توابع بر روی متغیرهایی در فضای کاری خود عمل می کنند که به آن فضای کاری محلی […]

کنترل کننده های مشتق انتگرال تناسبی (PID) یک دسته از کنترل کننده های صنعتی برای دستیابی به ویژگی های بهینه از نقطه نظر پاسخ زمانی هستند. کنترل مجموعه ای از متغیرهای فیزیکی تولید مانند موقعیت، سرعت، دما یا فشار توسط این دسته از کنترل کننده ها انجام می شود. این نوشته آموزشی در مورد طراحی […]
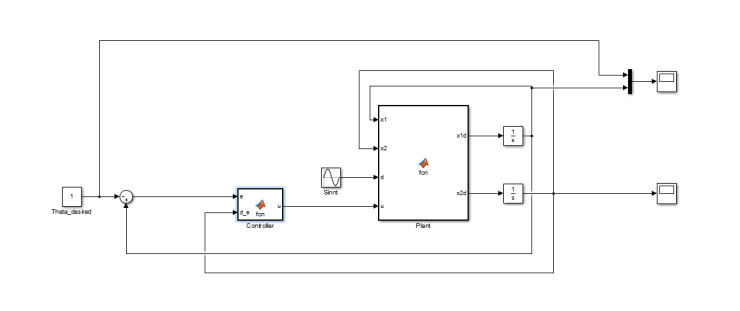
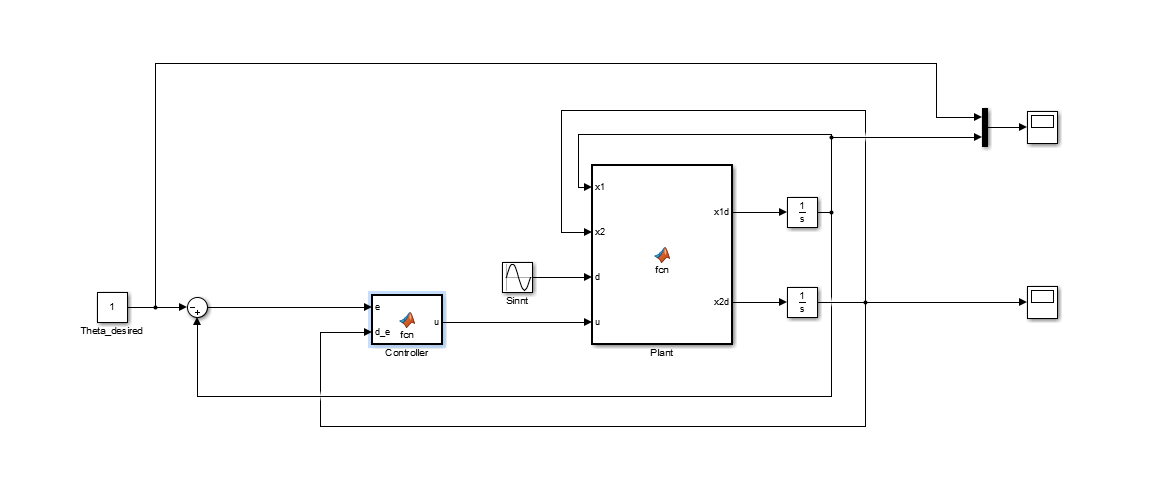
طراحی کنترل کننده مد لغزشی سیستم زیر را در نظر بگیرید : معادله 1 ) که در آن J ممان اینرسی ، سیگنال زاویه ، u(t) ورودی کنترل و d(t) عبارت از اغتشاش می باشد بطوریکه می باشد. حال با انتخاب تابع مدلغزشی به شکل زیر داریم : معادله 2 ) که در این معادله […]
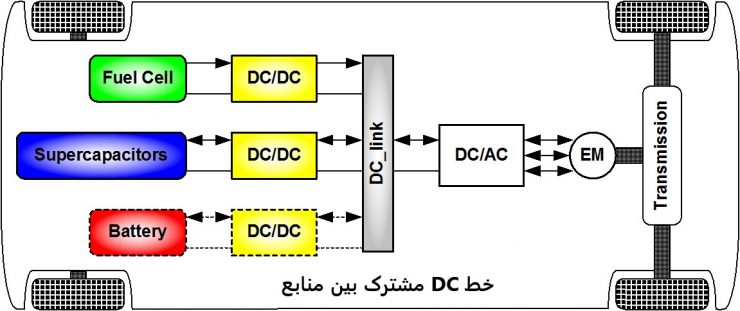
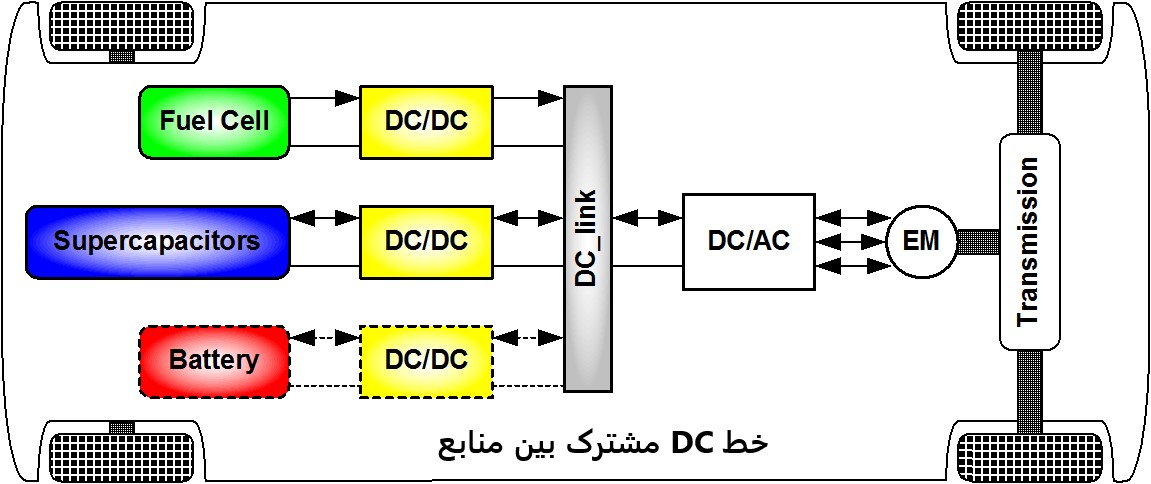
مروری بر خودروهای الکتریکی / هیبریدی خودروهای الکتریکی برای کشش، از یک موتور الکتریکی استفاده میکنند و به طور متناظر از باتریهای شیمیایی، پیلهای سوختی، ابرخازنها و یا فلایویلها به عنوان منابع انرژی استفاده میکنند. خودروی الکتریکی نسبت به خودروی معمولی با موتور احتراق داخلی (ICEV) دارای مزایای بسیاری همچون عدم تولید آلاینده، بازده بالا، […]

مروری بر سیستم های کنترل سیستم های کنترل بخشی جدایی ناپذیر از هر سیستم کارامد الکتریکی ، مکانیکی و یا الکترومکانیکی می باشد. یک سیستم بدون کنترل کننده ( کنترلر ) به عنوان یک سیستم حلقه باز مطرح می شود که بدون هر گونه فیدبک می باشد. این سیستم ها برای اینکه بتوانند یک ورودی […]

{kind=link}
{kind=link}
{kind=link}
اهمیت mfile (ام فایل) نویسی در متلب از ابتدایی ترین امکانات در هر زبان برنامه نویسی توانایی آن در تابع نویسی می باشد. با یک تعریف ساده تابع عملگری است که با دریافت یک یا چندین متغیر به عنوان ورودی و انجام عملیاتی بر روی آنها یک یا چند خروجی را ارائه می دهد. یک […]
مقدمه ای بر کنترل مقاوم سیستم های کنترل مقاوم به آنگونه کنترلرهایی اطلاق می شود که می توانند دو نوع نامعینی متداول در سیستم های مکانیکی و الکتریکی را پوشش داده و در حضور آنها اهداف زمانی و فرکانسی سیستم را تا حدی برآورده کنند. این نامعینی ها به صورت نامعینی بر روی پارامترهای سیستم […]
چگونه پروپوزال بنویسیم