انجام پروژه های حرفه ای مهندسی برق
شناسایی با شبکه عصبی – بیماری پارکینسون
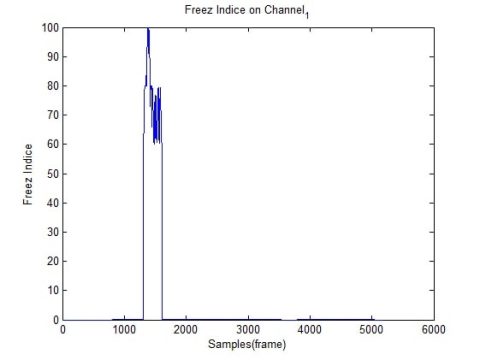
در این پروژه به بررسی عیب در یک سیستم (بیماری پارکینسون در سیستم حرکتی انسان) با استفاده از شبکه های عصبی پرداخته شده است. شناسایی سیستم با شبکه عصبی به عنوان کلمه کلیدی در این پروژه مطرح می باشد.
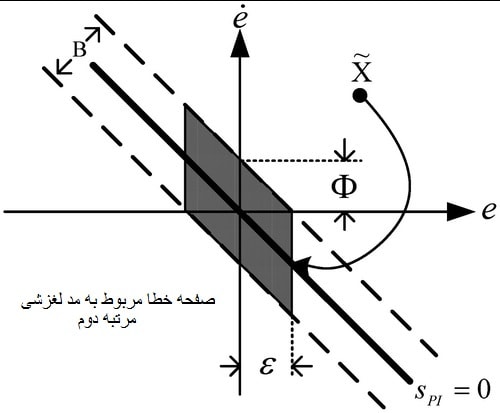
کنترل مد لغزشی برای سیستم های آشوبناک
در این پروژه پایان نامه از تکنیک مدلغزشی مرتبه بالا (مرتبه دوم) به منظور طراحی کنترل کننده برای سیستم آشوبناک استفاده شده است.
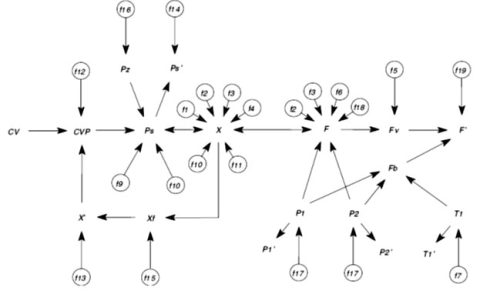
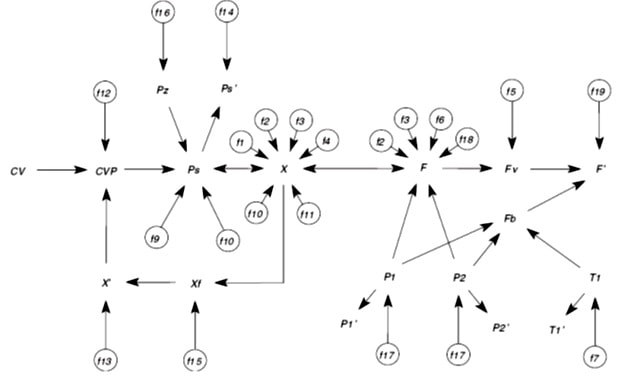
شناسایی و عیب یابی سیستم با شبکه عصبی – شیر صنعتی
در این پروژه به منظور شناسایی و عیب یابی یک سیستم محرک شیر صنعتی از شبکه های عصبی استفاده شده است. به منظور بررسی نتایج از محیط سیمولینک متلب استفاده شده است.
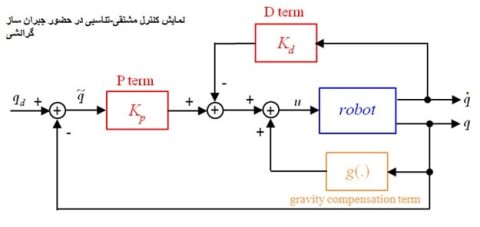
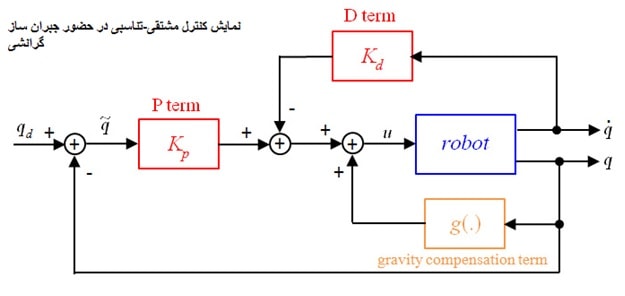
کنترل ربات – روش های خطی و غیرخطی
در این پروژه کنترل یک ربات با سه درجه آزادی و به فرم RRR با استفاده از روش های مختلف خطی و غیرخطی انجام شده است.
کنترل مد لغزشی میز سه درجه آزادی
در این پروژه پس از مدلسازی میز سه درجه آزادی به منظور کنترل راستاهای مورد نظر از روش کنترل مدلغزشی استفاده شده است.
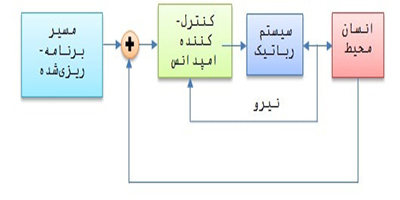
کنترل امپدانس برای بازوی پوششی(ربات پزشکی)
بکارگیری روش کنترل امپدانس به منظور کنترل موقعیت و نیرو برای بازوی ربات پوششی (کنترل بازوی شخص معلول)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}