
کانورتر توان Grid-Forming : این نوع کانورترهای توان اساسا مرتبط با واحدهای ذخیره کننده انرژی در ریزشبکه AC/DC می باشند. در عملکرد جزیره ای ، این کانورترهای توان پاسخگوی حفظ ولتاژ و فرکانس مرجع در سابگرید AC و ولتاژ مرجع در سابگرید DC میباشند. در مد متصل به شبکه ، این کانورترهای توان ، وظیفه […]
انجام پروژه های حرفه ای مهندسی برق
طراحی و پیاده سازی کنترلرها
این بخش بیشتر مختص دانشجویان کنترل می باشد که به آموزش و معرفی منابع برتر در طراحی سیستم های کنترل نظیر روش های خطی، غیرخطی، طراحی سیستم های کنترل مقاوم، بهینه سازی، طراحی انواع رویت گرها و آشنایی با سیستم های کنترل هوشمند می پردازد. دانشجویان مهندسی مکاترونیک و قدرت که نیاز به طراحی سیستم های کنترل دارند نیز می توانند از مطالب پیشرفته این بخش بهره ببرند.
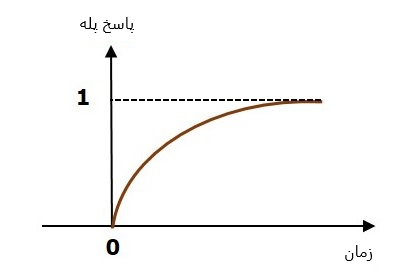
پایداری مفهوم مهمی است. در این فصل، اجازه دهید پایداری سیستم و انواع سیستم های مبتنی بر پایداری را مورد بحث قرار دهیم. سیستم پایدار چیست؟ به یک سیستم گفته می شود که اگر خروجی آن تحت کنترل باشد، پایدار است. در غیر این صورت گفته می شود که ناپایدار است. یک سیستم پایدار یک […]

کنترل کننده های مشتق انتگرال تناسبی (PID) یک دسته از کنترل کننده های صنعتی برای دستیابی به ویژگی های بهینه از نقطه نظر پاسخ زمانی هستند. کنترل مجموعه ای از متغیرهای فیزیکی تولید مانند موقعیت، سرعت، دما یا فشار توسط این دسته از کنترل کننده ها انجام می شود. این نوشته آموزشی در مورد طراحی […]
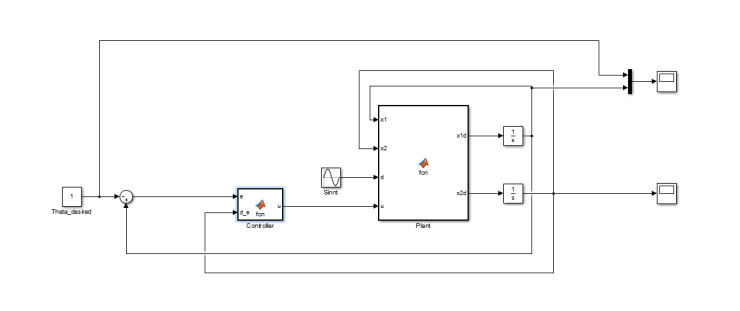
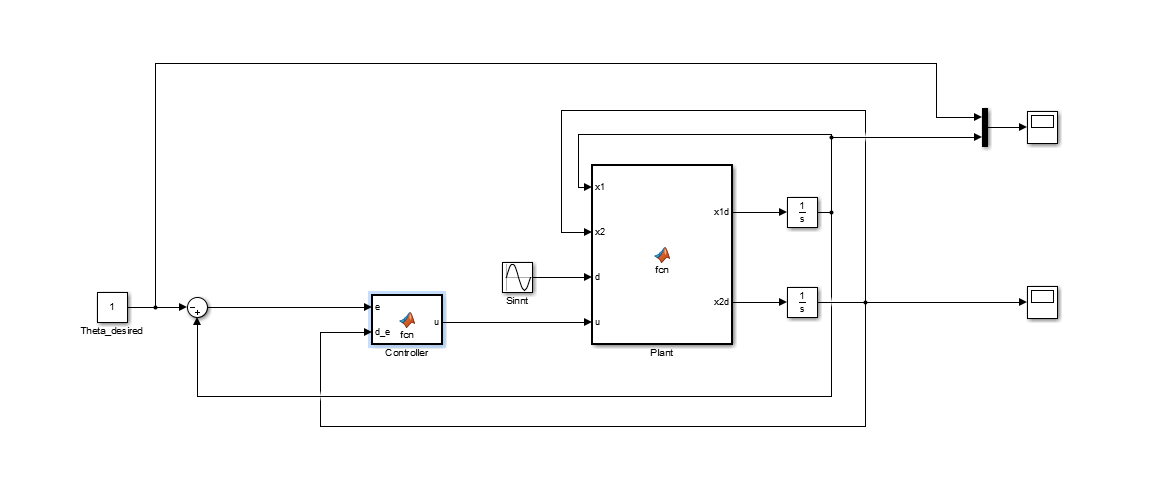
طراحی کنترل کننده مد لغزشی سیستم زیر را در نظر بگیرید : معادله 1 ) که در آن J ممان اینرسی ، سیگنال زاویه ، u(t) ورودی کنترل و d(t) عبارت از اغتشاش می باشد بطوریکه می باشد. حال با انتخاب تابع مدلغزشی به شکل زیر داریم : معادله 2 ) که در این معادله […]
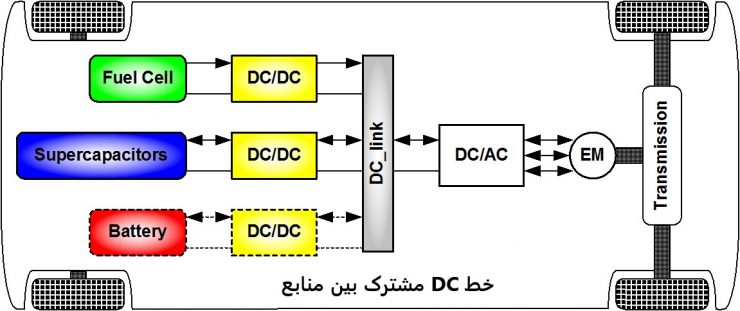
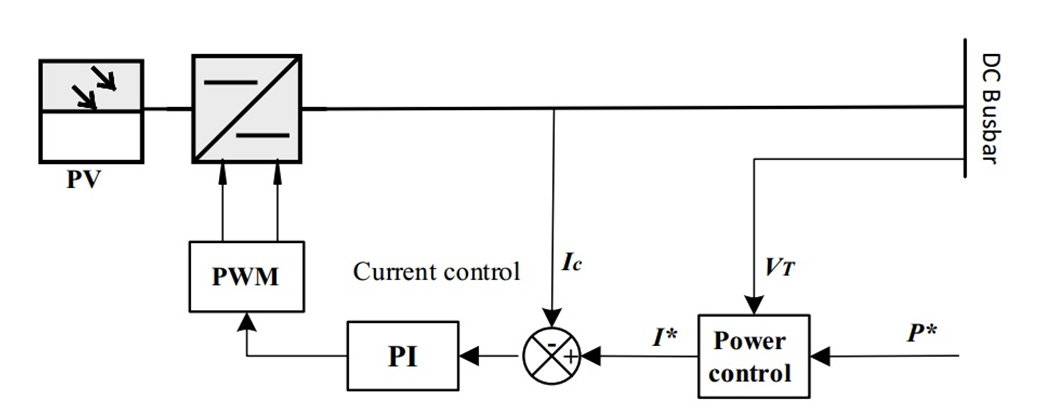
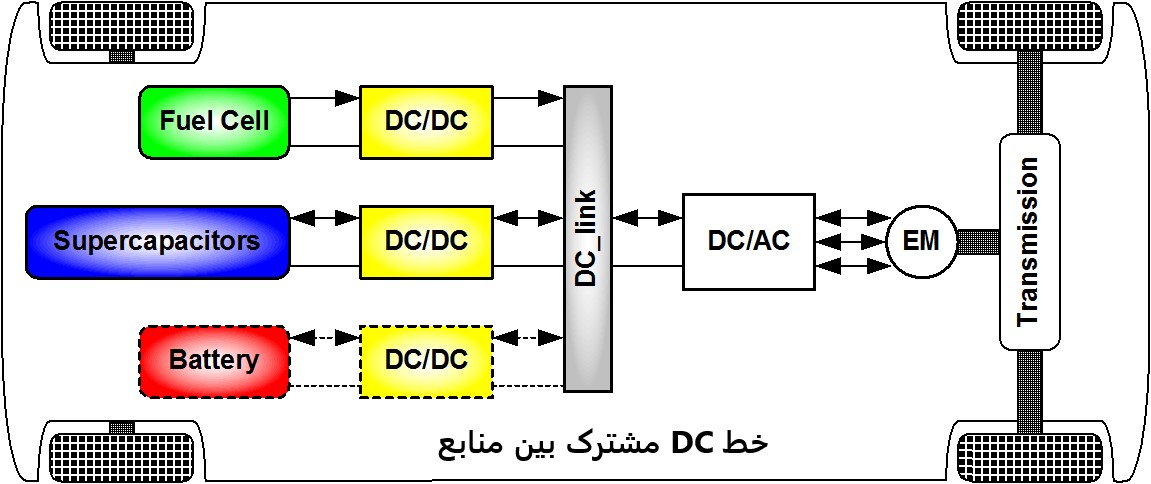
مروری بر خودروهای الکتریکی / هیبریدی خودروهای الکتریکی برای کشش، از یک موتور الکتریکی استفاده میکنند و به طور متناظر از باتریهای شیمیایی، پیلهای سوختی، ابرخازنها و یا فلایویلها به عنوان منابع انرژی استفاده میکنند. خودروی الکتریکی نسبت به خودروی معمولی با موتور احتراق داخلی (ICEV) دارای مزایای بسیاری همچون عدم تولید آلاینده، بازده بالا، […]

مروری بر سیستم های کنترل سیستم های کنترل بخشی جدایی ناپذیر از هر سیستم کارامد الکتریکی ، مکانیکی و یا الکترومکانیکی می باشد. یک سیستم بدون کنترل کننده ( کنترلر ) به عنوان یک سیستم حلقه باز مطرح می شود که بدون هر گونه فیدبک می باشد. این سیستم ها برای اینکه بتوانند یک ورودی […]
مقدمه ای بر کنترل مقاوم سیستم های کنترل مقاوم به آنگونه کنترلرهایی اطلاق می شود که می توانند دو نوع نامعینی متداول در سیستم های مکانیکی و الکتریکی را پوشش داده و در حضور آنها اهداف زمانی و فرکانسی سیستم را تا حدی برآورده کنند. این نامعینی ها به صورت نامعینی بر روی پارامترهای سیستم […]
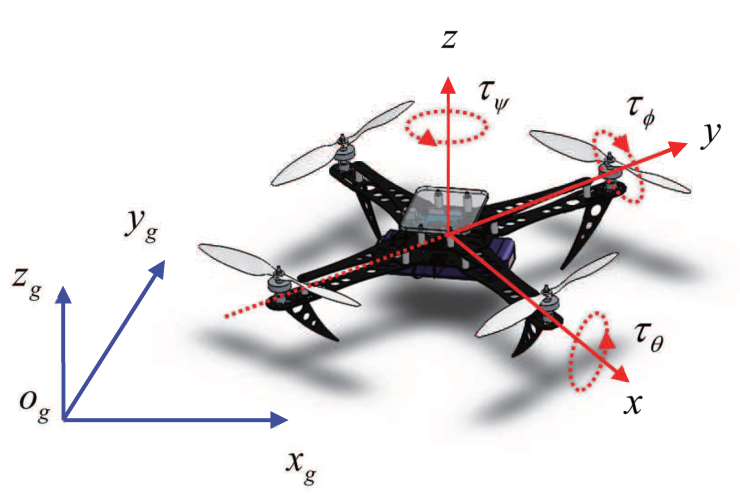
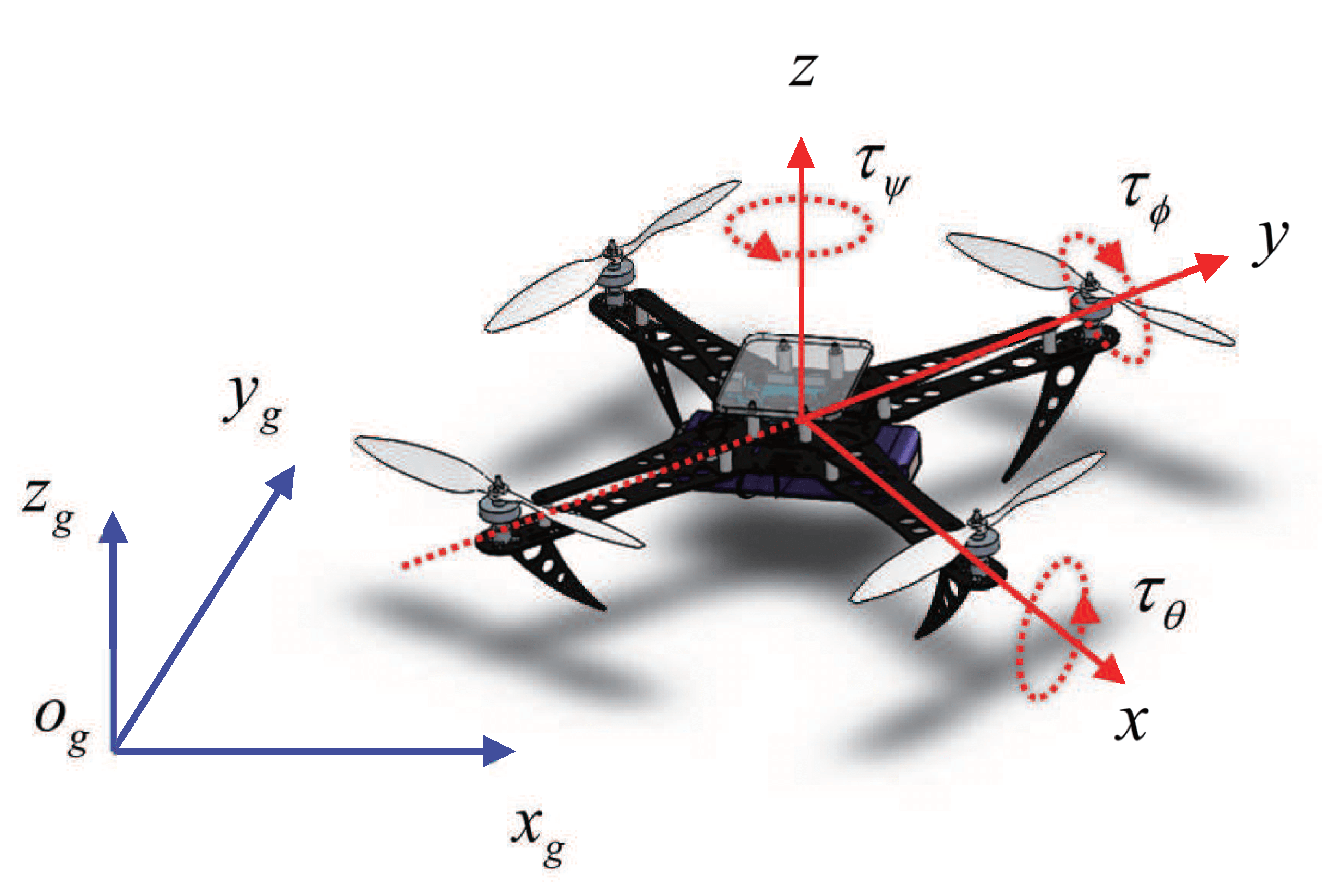
در این نوشته در مورد دینامیک، روش های کنترل و نیازهای کنترلی در سیستم های کووادروتور صحبت شده است. در این بین کاربردهایی در روش های عبور از موانع و حرکت گروهی کووادها مورد بررسی قرار گرفته است.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
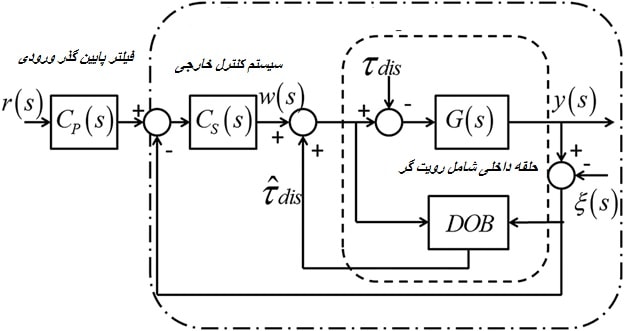
در این پروژه به منظور حذف اغتشاش بزرگ در موتور DC از یک رویت گر حذف اغتشاش استفاده شده است. در اینجا از روش طراحی رویت گر به منظور حذف اغتشاش استفاده شده است.