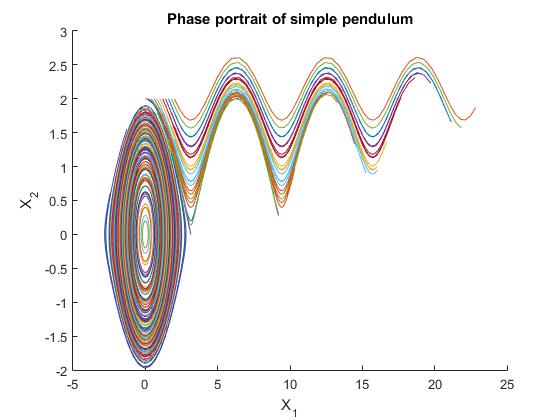
پرتره فاز نمایش هندسی مسیرهای یک سیستم دینامیکی در صفحه فاز است. هر مجموعه از شرایط اولیه با یک منحنی یا نقطه متفاوت نشان داده می شود. پرتره های فازی ابزاری ارزشمند در مطالعه سیستم های دینامیکی هستند. آنها از طرحی از مسیرهای معمولی در فضای حالت تشکیل شده اند. این اطلاعاتی مانند اینکه آیا […]
انجام پروژه های حرفه ای مهندسی برق
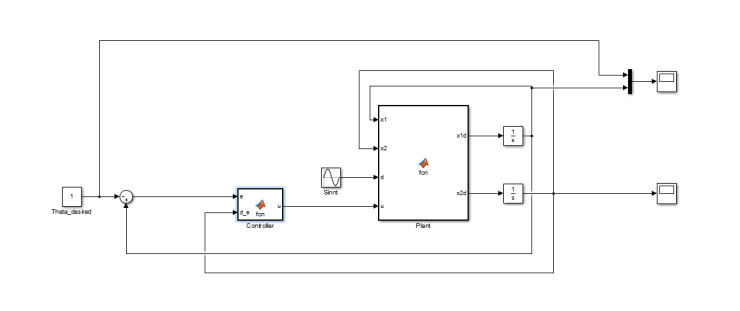
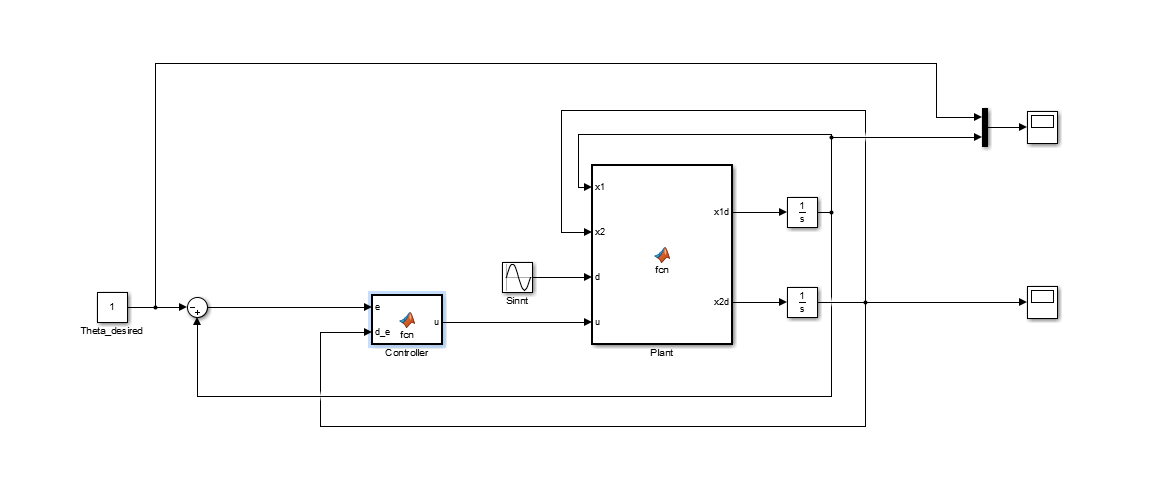
طراحی کنترل کننده مد لغزشی سیستم زیر را در نظر بگیرید : معادله 1 ) که در آن J ممان اینرسی ، سیگنال زاویه ، u(t) ورودی کنترل و d(t) عبارت از اغتشاش می باشد بطوریکه می باشد. حال با انتخاب تابع مدلغزشی به شکل زیر داریم : معادله 2 ) که در این معادله […]

مروری بر سیستم های کنترل سیستم های کنترل بخشی جدایی ناپذیر از هر سیستم کارامد الکتریکی ، مکانیکی و یا الکترومکانیکی می باشد. یک سیستم بدون کنترل کننده ( کنترلر ) به عنوان یک سیستم حلقه باز مطرح می شود که بدون هر گونه فیدبک می باشد. این سیستم ها برای اینکه بتوانند یک ورودی […]
مقدمه ای بر کنترل مقاوم سیستم های کنترل مقاوم به آنگونه کنترلرهایی اطلاق می شود که می توانند دو نوع نامعینی متداول در سیستم های مکانیکی و الکتریکی را پوشش داده و در حضور آنها اهداف زمانی و فرکانسی سیستم را تا حدی برآورده کنند. این نامعینی ها به صورت نامعینی بر روی پارامترهای سیستم […]
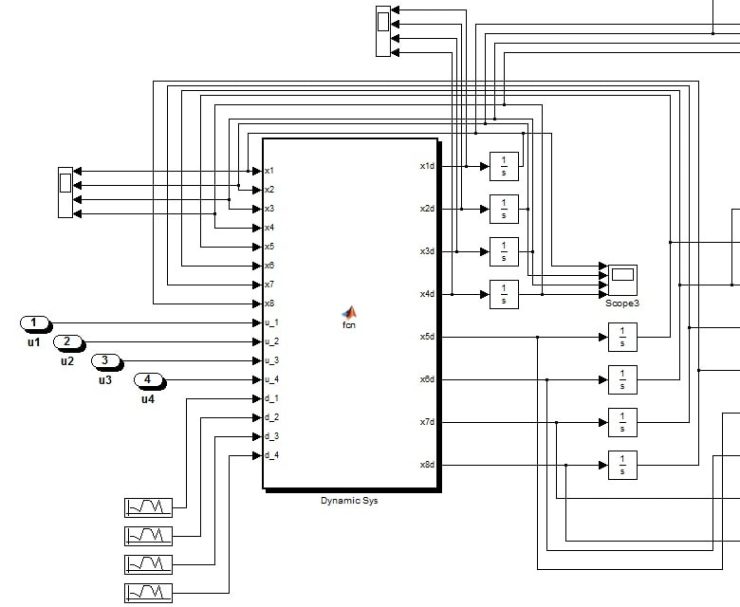
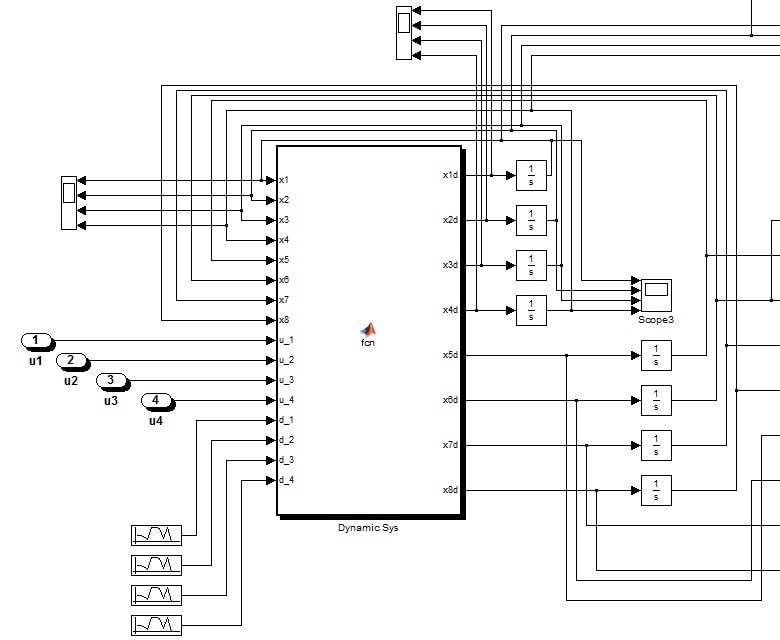
پیاده سازی دینامیک سیستم دینامیک سیستم یا مدل دینامیکی یک سیستم عبارت از یک یا چند معادله دیفرانسیلی می باشد که به صورت خطی و یا غیرخطی بیان می شوند. بیان دینامیک سیستم در حالت کلی به صورت (dX/dt = f(X نوشته می شود. در این رابطه X به عنوان بردار متغیرهای حالت و تابع […]
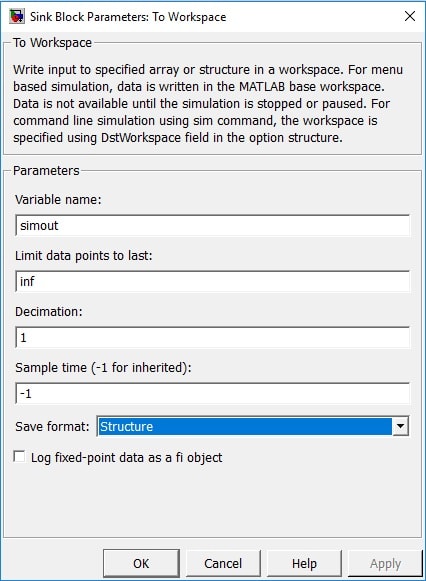
در این نوشته ذخیره انواع داده ها در متلب تشریح شده است. و روش های ذخیره سازی داده ها از سیمولینک در وُرک اسپیس متلب تشریح شده است.
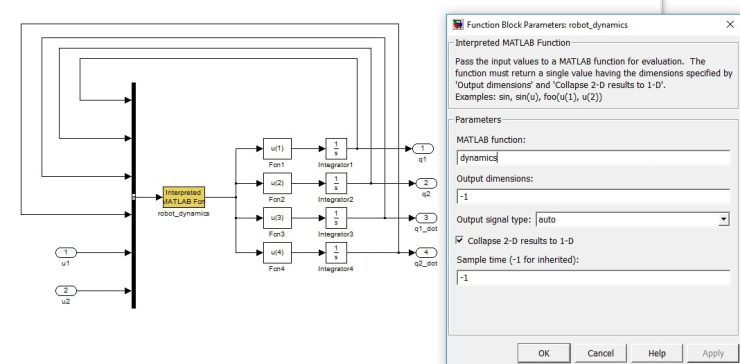
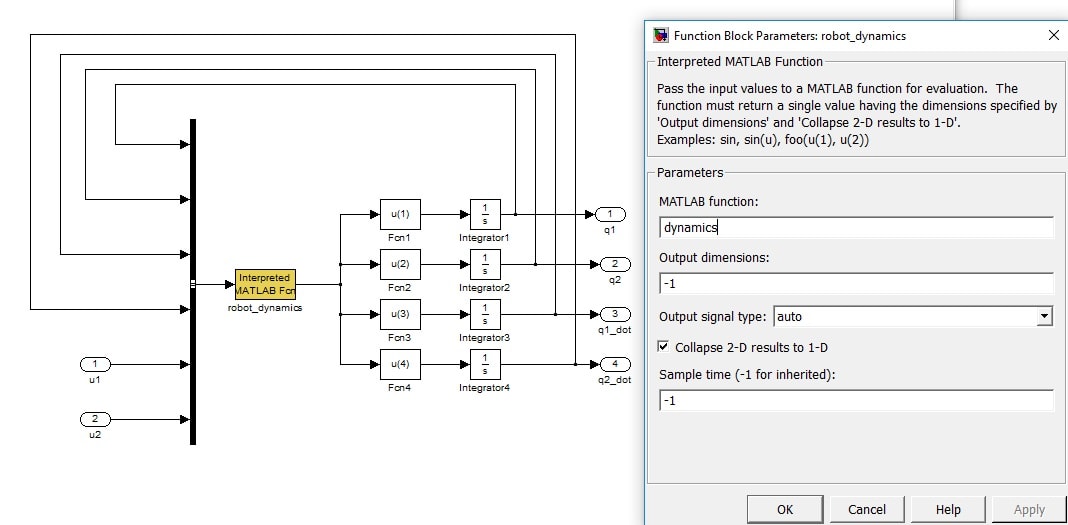
در این آموزش مقدمه ای بر تابع نویسی در محیط سیمولینک متلب ارائه شده است. همچنین بلوک های متداول در این امر معرفی و توضیحاتی در خصوص آن ها بیان شده است.
در این نوشته مقدمه ای بر تابع نویسی و معرفی ملزومات مورد نیاز به این منظور ارائه شده است. اطلاعاتی در خصوص جعبه ابزار ها در متلب و در سیمولینک در ادامه آمده است.
{kind=link}
{kind=link}
{kind=link}
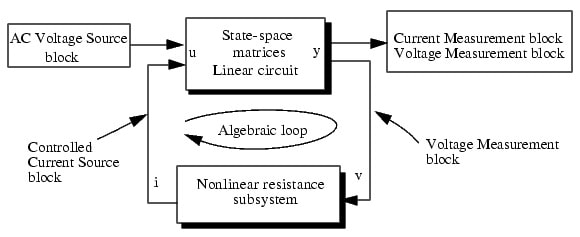
در این آموزش درباره خطای لوپ جبری در محیط سیمولینک متلب توضیح داده شده و روش هایی برای برطرف کردن این خطا ارائه شده است.