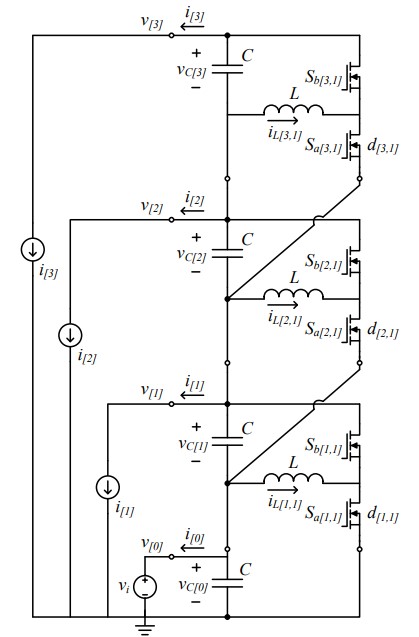
اخیراً علاقهای به گسترش شبکههای جریان مستقیم (dc) وجود داشته است که انگیزه اصلی آن افزایش منابع انرژی تجدیدپذیر، ذخیره انرژی الکتریکی و بارهای الکترونیکی است که با توان dc کار میکنند. یکی از چالشهای کلیدی که مانع پذیرش شبکههای dc میشود، فقدان توپولوژیهای مبدل dc-dc با کارایی بالا برای تطبیق تبادل انرژی ac، در […]
انجام پروژه های حرفه ای مهندسی برق
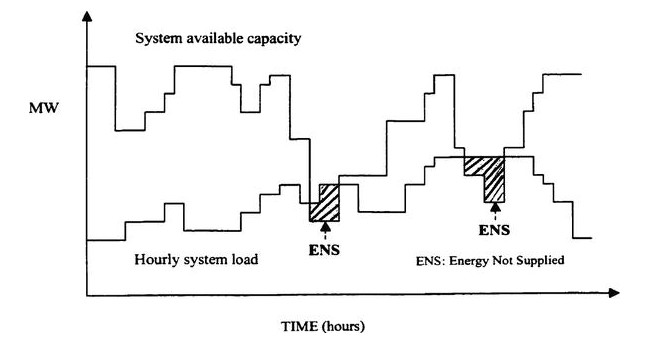
تعریف قابلیت اطمینان قابلیت اطمینان ، احتمال این است که یک وسیله ، تحت شرایط بهره برداری که با آن مواجه می شود هدفش را به طور دقیق برای دوره زمانی مورد نظر به انجام برساند. در واقع قابلیت اطمینان ، توانایی یک سیستم برای ادامه فعالیت بدون عیب است و این یعنی این که […]

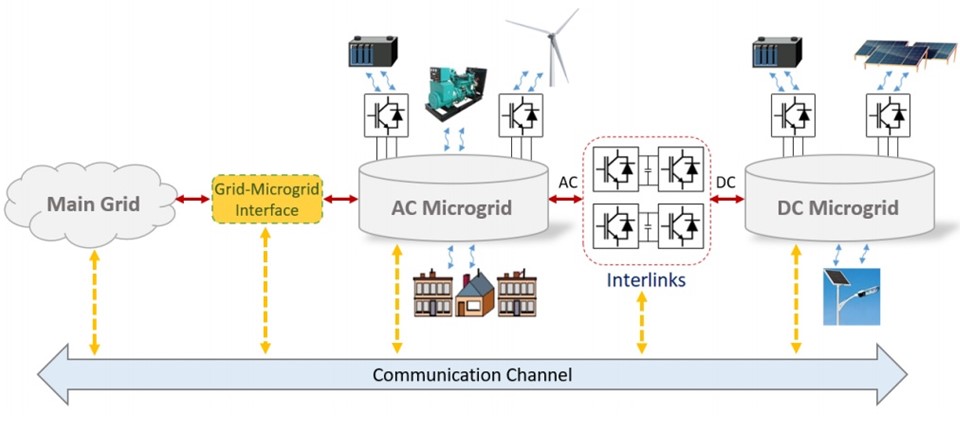
کانورتر توان Grid-Forming : این نوع کانورترهای توان اساسا مرتبط با واحدهای ذخیره کننده انرژی در ریزشبکه AC/DC می باشند. در عملکرد جزیره ای ، این کانورترهای توان پاسخگوی حفظ ولتاژ و فرکانس مرجع در سابگرید AC و ولتاژ مرجع در سابگرید DC میباشند. در مد متصل به شبکه ، این کانورترهای توان ، وظیفه […]

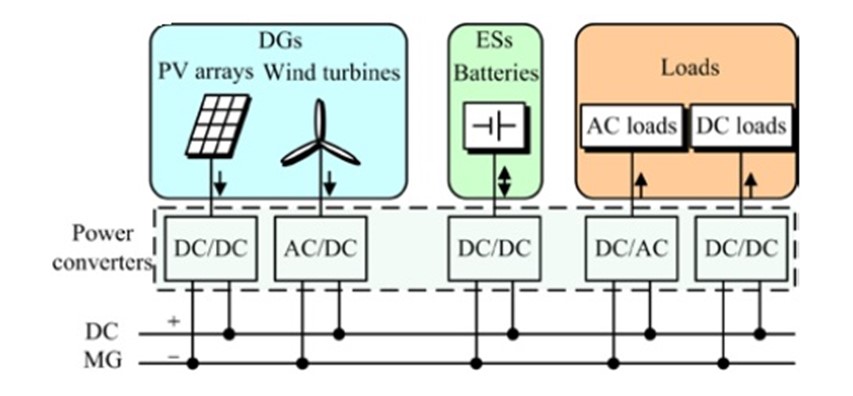
ریزشبکه ها را براساس عوامل مختلفی مانند نوع منابع و مصرفکنندهها طبقهبندی میکنند. به طور کلی میتوان ریزشبکه ها را به ریزشبکه های جریان متناوب(AC)، ریزشبکه های جریان مستقیم(DC)، و ریزشبکه های ترکیبی (AC/DC) تقسیم بندی نمود. ریزشبکه جریان متناوب AC ریزشبکه جریان متناوب AC متداول ترین نوع ریزشبکه است و اشکال مختلفی از تولیدات […]
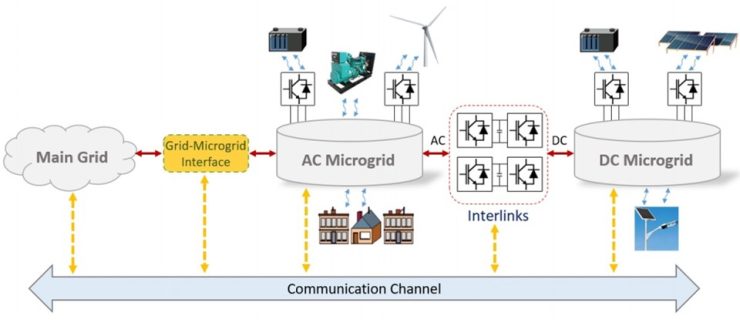
در یک نگاه ریزشبکه ها را می توان به صورت بخش هایی از شبکه انرژی در نظر گرفت که توانایی ایجاد پایداری توان در آن بدون بهره گیری از شبکه بالادست قابل دسترس است. ریزشبکه ها دارای تنوع بالایی در تشکیل ، انواع بار و مولدها و نحوه کنترل می باشند. اما آنچه مهم است […]
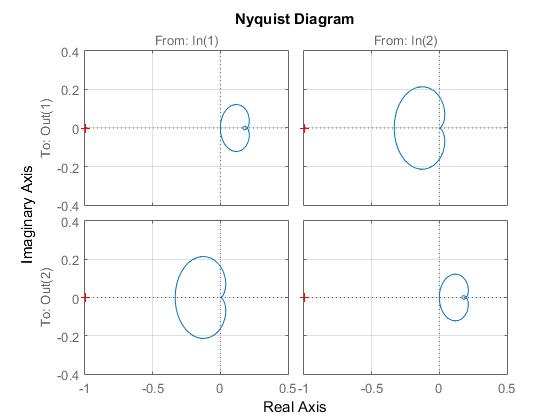
فضای حالت در واقع بیانگر چگونگی برهم کنش متغیرهای حالت یک سیستم نسبت به هم در طول زمان م باشد. به طور متداول این زمان از t0=0 شروع شده می تواند تا هر زمانی ادامه داشته باشد. به طور قطع می توان گفت در مدل فضای حالت سیستم تمامی نکات یک سیستم قابل استخراج است. […]
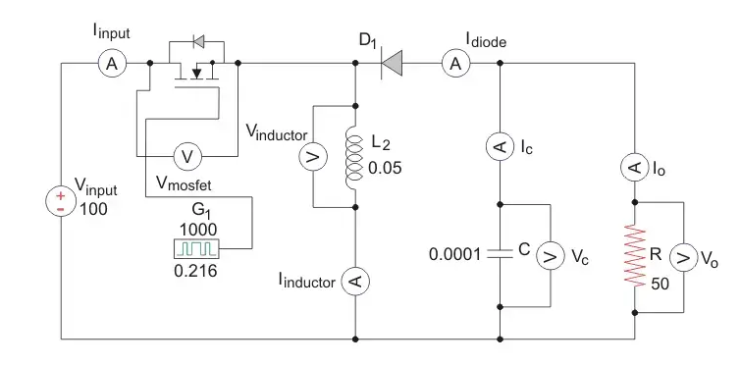
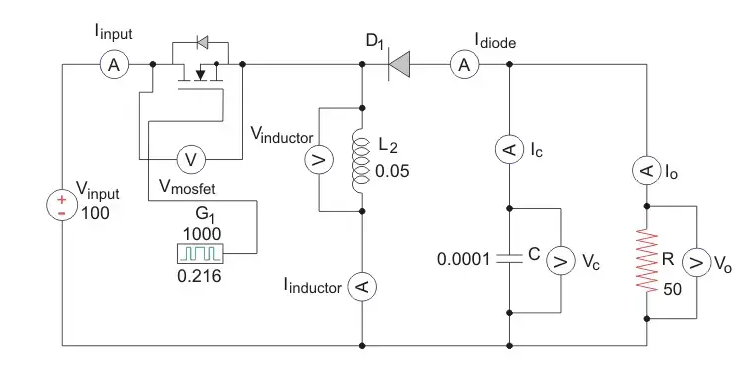
مبدل Buck Boost چیست؟ مبدل باک-بوست نوعی مبدل DC به DC (همچنین به عنوان یک چاپر شناخته می شود) است که دارای ولتاژ خروجی است که یا بیشتر یا کمتر از قدر ولتاژ ورودی است. برای “افزایش” ولتاژ DC، مشابه ترانسفورماتور مدارهای AC استفاده می شود. معادل یک مبدل فلای بک است که از یک […]
تفاوت بین نیروگاه خورشیدی و بادی منابع انرژی بادی و خورشیدی هر دو تحت منابع انرژی تجدیدپذیر قرار می گیرند زیرا بی نهایت هستند. تنها تفاوت آنها در نحوه به دست آوردن انرژی مورد نیاز برای تولید الکتریسیته است زیرا انرژی باد از جریان هوا به دست می آید اما خورشید انرژی خود را از […]
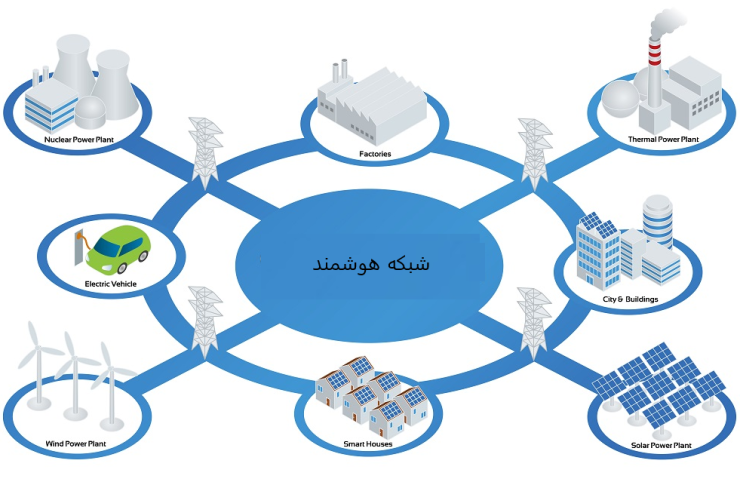
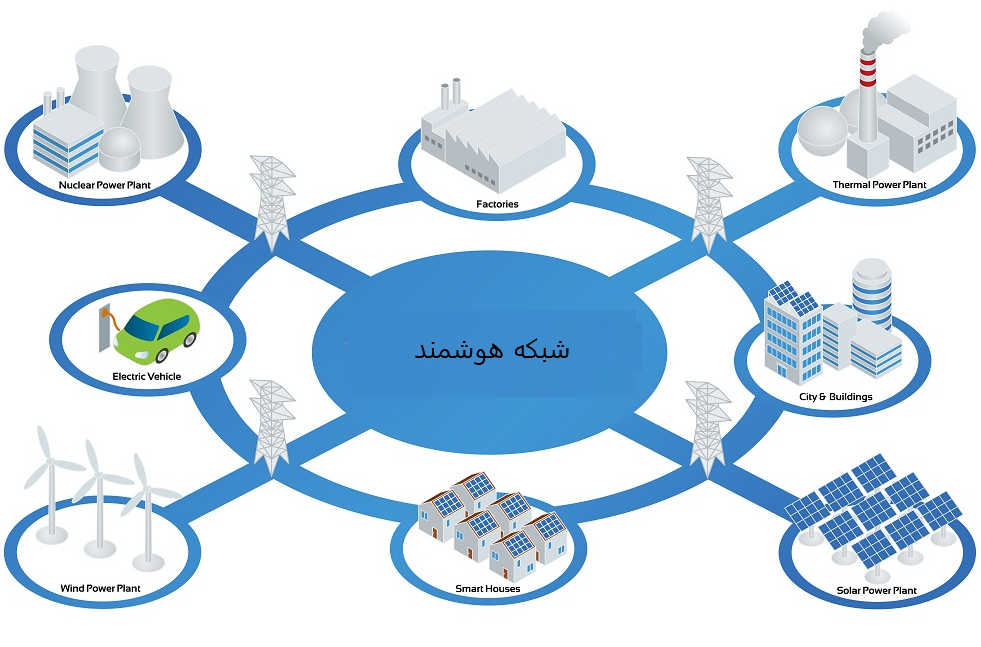
شبکه هوشمند چیست شبکه هوشمند یک فناوری مدرن برای رفع خطاها با راه حل های دقیق است. یک شبکه هوشمند از هر دو بخش سخت افزاری و نرم افزاری تشکیل شده است. قطعات سخت افزاری انرژی را از منابع مختلف مانند باد، خورشید، جزر و مد و غیره جمع آوری می کنند و منابع توان […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
انواع تلفات در سیستم PV تلفات ناشی از فرآیند میدانی یک ژنراتور PV باید به منظور تخمین دقیق خروجی برق واقعی آن ارزیابی شود. زیان های بعدی باید در نظر گرفته شود. در شکل زیر انواع تلفات مورد نظر برای سیستم های سلول خورشیدی نمایش داده شده است که در ادامه چند نوع مهم آن […]