انجام پروژه های حرفه ای مهندسی برق
بیان مقدمه و اهداف پروژه (طراحی کنترل مدلغزشی برای میز سه درجه آزادی)
میز سه درجه آزادی یکی از انواع سیستم های شبیه ساز پرواز می باشد که با استفاده از اطلاعات موقعیت درونی موشک، بدست آمده از برنامه شبیه سازی شش درجه آزادی ، سعی می کند سیستم تحت آزمون را در هنگام انجام آزمون سخت افزار در حلقه ، در همان راستایی قرار دهد که در یک شلیک واقعی قرار می گیرد. این میز قابلیت دوران در سه راستای غلطش(Roll) ، فراز(Pitch) و سمت(Yaw) را دارا می باشد. کنترل میز سه درجه آزادی شامل پایدارسازی رفتار میز در راستاهای مورد نظر می باشد. در این پروژه از کنترل مد لغزشی برای این میز بهره گرفته شده است.
شمای یک میز سه درجه آزادی در شکل زیر نمایش داده شده است.

شماتیک یک میز سه درجه آزادی
هدف اصلی در این پروژه پایان نامه هدایت میز سه درجه آزادی در یک مسیر مشخص می باشد. در این بین پارامترهای شبیه ساز و ماشین PMSM که به عنوان بخش قدرتی کنترلر می باشد به صورت نامعین در نظر گرفته می شوند. همانطور که می دانیم کنترل مد لغزشی یکی از روش های مقاوم در تثبیت موقعیت یک سیستم در شرایط نامعین می باشد. این کنترل کننده با دارا بودن بخش لغزش و قدرت سوئیچ زنی بالا بر روی صفحه خطا می تواند تاثیر عدم قطعیت های مدل را در خروجی کاهش دهد. اگر چه همین مسئله باعث نوسانات فرکانس بالا بر روی سیگنال کنترل می گردد که از آن بعنوان چترینگ یاد می شود.
توضیحات کلی
در این پروژه با یک سیستم ساختار متغیر روبرو هستیم. سیستمی که بنابه تغییرات خروجی دچار اغتشاشاتی با کرانه محدود بر نواحی مختلف خود می باشد. بطور کلی میز سه درجه آزادی دارای یک دینامیک غیرخطی پیچیده می باشد که مدل آن در مقالات مورد بررسی قرار گرفته است.
روش کنترل مد لغزشی می تواند در این چنین سیستم هایی با نامعینی بالا بکار رود. اهمیت این روش در کنترل سیستمهای دارای عدم قطعیت مشخص میشود. عدم قطعیت مدل سیستم غیرخطی ممکن است ناشی از مبهم بودن دستگاه (ناشناخته بودن پارامترهای ماشین PMSM) و یا نامعینی های ساختاری ناشی از ساده سازی باشد. عدم قطعیتهای مدلسازی میتوانند به دو دستهی اصلی تقسیم شوند: عدم قطعیتهای ساختاری( یا پارامتری) و عدم قطعیتهای غیر ساختاری(دینامیکهای مدل نشده). دسته اول به بیدقتی اجزای مدل، و دسته دوم به بیدقتی در مرتبهی سیستم مربوط میشوند.عدم قطعیت مدلسازی میتواند آثار نامطلوبی بر سیستم کنترل غیرخطی داشته باشد. یکی از مهمترین دیدگاههای مواجهه با عدم قطعیت مدلسازی کنترل مقاوم است. کنترل مد لغزشی نوعی کنترل مقاوم است که پایداری سیستمها را حفظ میکند، میان مدلسازی و عملکرد تعادل برقرار میکند و سبب میشود سیستمها در مواجه با بیدقتیهای مدلسازی عملکرد ثابتی داشته باشد.
در عمل کنترل مد لغزشی برای سوق دادن مسیرهای یک سیستم دینامیک به لغزش در امتداد مسیر مشخصی از زیر فضای مود لغزشی استفاده میشود. در کنترل میز سه درجه آزادی با یک ماشین PMSM که در دو جهت d و q کنترل می شود روبرو هستیم. در واقع هدف تنظیم مناسب مولفه های جریان در این دو جهت می باشد(جهات معرفی شده در دروس ماشین های الکتریکی توصیف شده اند). این دو مولفه به عنوان ورودی کنترل مطرح می باشد.
در یک میز با سه درجه آزادی سه راستای رول ، پیچ و یاو کنترل می شوند. برهمین اساس سه مولفه جریانی که هر کدام در جهات d و q اعمال می شوند بر روی آن مورد بررسی قرار می گیرد. پس با این اساس ما در این سیستم 6 سیگنال کنترل داریم که برای میز با سه راستا مورد استفاده قرار می گیرد.
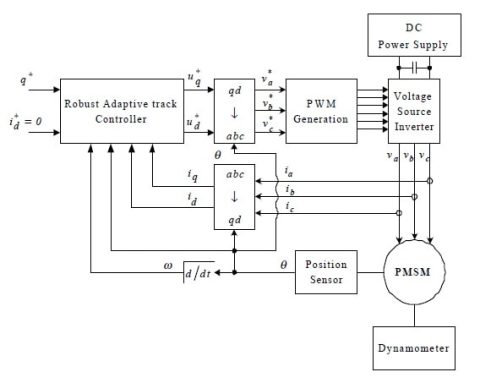
مدل کلی شماتیک کنترل سیستم بصورت زیر می باشد.

شماتیک مدل در حضور کنترل کننده
بیان الگوریتم کار
همانطور که عنوان شد، در این سیستم هدف تعیین مولفه های جریان برای ماشین های PMSM می باشد تا بتوانند راستاهای مورد نظر رول ، پیچ و یاو را کنترل نمایند. مدل دینامیکی این سیستم در فضای حالت بصورت زیر معرفی می شود.

فرم فضای حالت مدل میز سه درجه آزادی
دو ردیف اول این مدل مرتبط با مدل ماشین PMSM در راستاهای d و q می باشد. که هر کدام سه راستا را شامل می شوند(هر موتور PMSM برای یک راستا در نظر گرفته می شود). و ردیف سوم که مرتبط با مکانیک بازوی میز می باشد.
فرم سیستم کنترل بدست آمده با استفاده از طراحی کنترل مد لغزشی بصورت زیر می باشد.

فرم کنترل مد لغزشی بدست آمده
این فرم برای دو جهت d و q بدست می آید و رگرسورهای Y نقش ضرایب کنترل کننده را ایفا می کنند. در بدست آوردن صفحه لغزش از منابعی همچون کتاب حسن خلیل می توان استفاده کرد.
شبیه سازی پروژه
شبیه سازی یک میز سه درجه آزادی احتمالا پیچیده ترین شبیه سازی شما خواهد بود ! . به منظور انجام شبیه سازی مورد نظر نیاز به اجرای کدنویسی در محیط سیمولینک دارید که آموزش آن را در بخش آموزش متلب قرار داده ایم.
در شبیه سازی این سیستم نیاز به ارتباط بخش لغزش، کنترل کننده و پلنت مورد نظر را دارید. در بخش پلنت بایستی مدل یک سیستم با 12 متغیر حالت را که توسط 6 سیگنال کنترل می شود بیاورید. در ادامه برخی از نتایج شبیه سازی نمایش داده شده است.

نتیجه بدست آمده برای زوایای سیستم در راستاهای مختلف

سیگنال سطح لغزش برای کنترل مدلغزشی
منبع : برق تِک