انجام پروژه های حرفه ای مهندسی برق
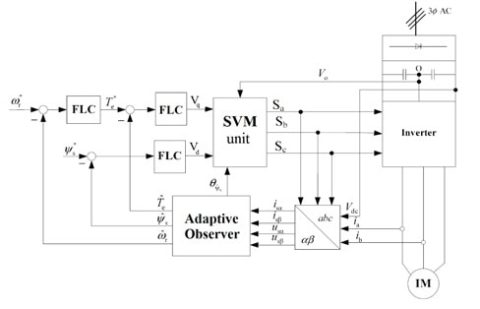
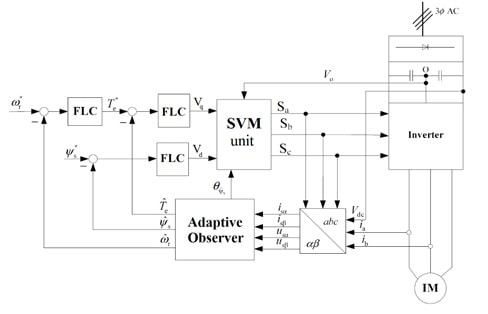
کنترل فازی موتور القائی با بکارگیری روش کنترل مستقیم گشتاور
در این پروژه از منطق فازی به منظور کنترل سرعت و گشتاور برای موتور القائی استفاده شده است.
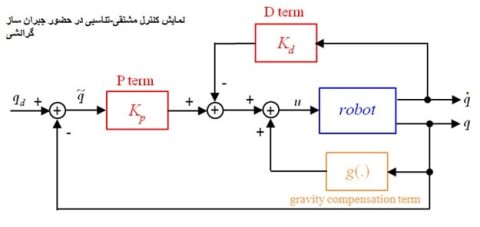
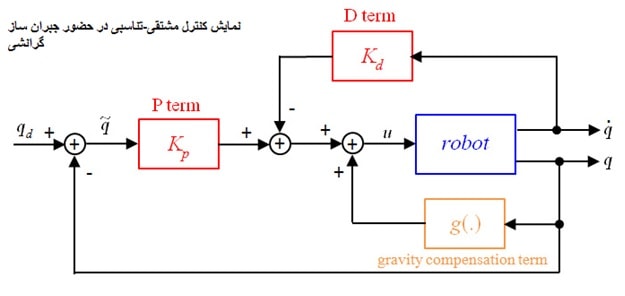
کنترل ربات – روش های خطی و غیرخطی
در این پروژه کنترل یک ربات با سه درجه آزادی و به فرم RRR با استفاده از روش های مختلف خطی و غیرخطی انجام شده است.
کنترل مد لغزشی میز سه درجه آزادی
در این پروژه پس از مدلسازی میز سه درجه آزادی به منظور کنترل راستاهای مورد نظر از روش کنترل مدلغزشی استفاده شده است.
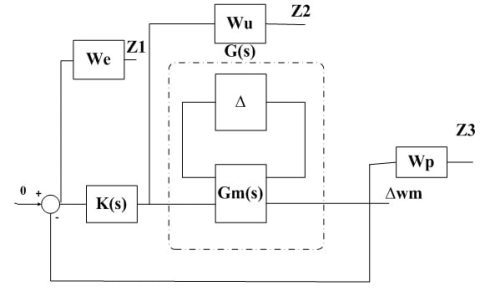
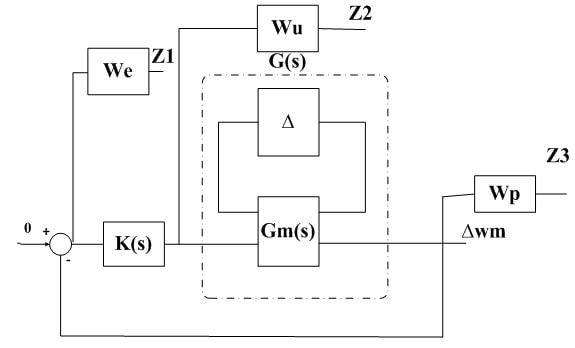
کنترل مقاوم ریزشبکه در حضور توربین بادی و منابع DG
در این پروژه پایان نامه یک ریزشبکه در حضور ماشین سنکرون و توربین بادی به عنوان منبع DG مدلسازی شده و سپس برای پایدارسازی فرکانس آن از کنترل مقاوم به روش H اینفینیتی استفاده شده است.
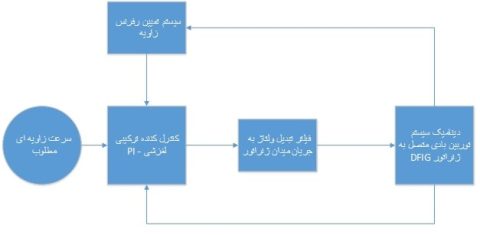
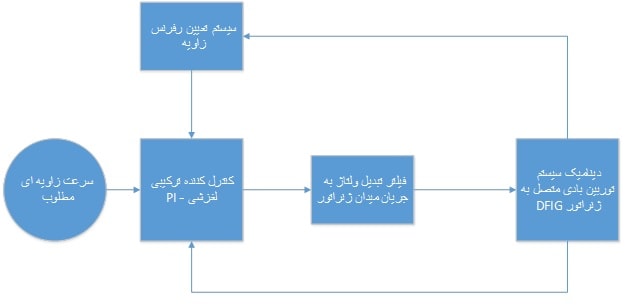
طراحی رویت گر به منظور بهبود عملکرد سیستم توربین بادی
طراحی رویت گر با بهره گیری از روش هوشمند برای توربین بادی انجام گرفته است. این طراحی باعث بهبود پایداری سیستم شده و متوسط توان خروجی توربین افزایش یافته است.
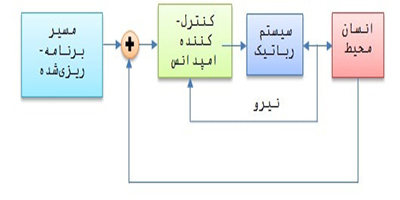
کنترل امپدانس برای بازوی پوششی(ربات پزشکی)
بکارگیری روش کنترل امپدانس به منظور کنترل موقعیت و نیرو برای بازوی ربات پوششی (کنترل بازوی شخص معلول)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

در این وبسایت منابع آموزشی تخصصی رشته مهندسی برق گرایش های قدرت، کنترل، الکترونیک و همچنین مکاترونیک به صورت رایگان برای دانلود قرار داده شده است. این منابع به صورت آموزش مطالب تحلیلی و نرم افزارهای مرتبط می باشد.

آموزش های تخصصی مرتبط با پروژه-پایان نامه به صورت گام به گام و حرفه ای برایتان بیان می گردد و در این راستا از فناوری های مرتبط با آموزش های تصویری تا آموزش های حضوری در دفتر تهران بهره برده می شود.

گروه آموزشی متخصص در نرم افزاهای متلب ، هومر ، پی اسکد و ... شما در امر آموزش و مشاوره برای پیاده سازی تحلیل های خود بی نیاز خواهد کرد. ارائه آموزش های تخصصی در زمینه شبیه سازی پایان نامه ها از دیگر خدمات سایت می باشد.