انجام پروژه های حرفه ای مهندسی برق
در این پست ، کتاب طراحی رویت گر و نقش رویت گرها در سیستم های کنترل به منظور دانلود رایگان قرار داده شده است. در این کتاب بحث رویت گر و ارتباط آن با عدم قطعیت ، نویز و اغتشاشات تشریح شده است.
طراحی رویت گر حالت
طراحی رویت گر به مفهوم تشکیل معادلات دیفرانسیل براساس ورودی هایی که به عنوان خروجی سیستم می باشند، هست. هدف از طراحی رویت گر بدست آوردن متغیرهای حالت سیستم (پلنت) مورد نظر می باشد. به طور کل رویت گر ها به دو دسته خطی و غیرخطی تقسیم می شوند. در طراحی به روش خطی صرفا از دینامیک خطای خروجی استفاده می شود(خطای خروجی ها از مقادیر مرجع مد نظر قرار می گیرد). اما در طراحی های غیرخطی می توان از روش های برمبنای مدلغزشی و یا دینامیک وارون در رباتیک بهره برد.

طراحی رویت گر حالت
در طراحی رویت گر حالت و در انتخاب روش معمولا به دینامیک سیستم مراجعه می شود. بالتبع در دینامیک های خطی کار ساده تر می باشد. در این سیستم ها می توان با استفاده از بررسی رویت پذیری سیستم از الگوریتم های مختلفی نظیر LQG و LQG/LTR بهره برد. اما در دینامیک های غیرخطی این وضعیت قدری پیچیده تر است. چرا که به طور کلی تشخیص رویت پذیری در سیستم های غیرخطی پروسه ای پیچیده است.
کتاب طراحی رویت گر – رویت گرها در سیستم های کنترل
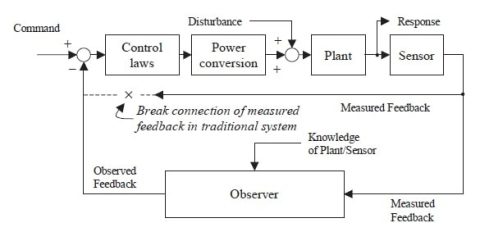
با توجه به پیش زمینه بیان شده، آشنایی با رویت گر ها و آموزش انواع الگوریتم های طراحی رویت گر می تواند در حل مسائل کنترل مفید باشد. بالاخص اینکه در اکثر سیستم ها نمی توان بطور مستقیم از متغیرهای حالت سیستم استفاده کرد(به علت در دسترس نبودن سیگنال، وجود نویز و یا گران بودن سنسور). در این شرایط استفاده از رویت گر ها امری الزام آور می باشد.
در این کتاب که می توانید آن را از لینک دانلود کنید به بررسی و مطالعه رویت گرها و نقش آن ها در سیستم های کنترل پرداخته شده است. انواع الگوریتم های طراحی رویت گر در این کتاب مطالعه شده و نتایج شبیه سازی آن ها نمایش داده شده است.
در این کتاب می خوانیم :
- سیستم های کنترل و نقش رویت گرها
- مقدمه ای بر سیستم های کنترل
- مروری بر دامنه فرکانسی
- رویت گر لانگ برگر : تصحیح خطاهای سنسور
- رویت گر لانگ برگر و عدم قطعیت مدل
- رویت گر لانگ برگر و اغتشاشات
- نویز در رویت گر لانگ برگر
- کاربرد رویت گر لانگ برگر در کنترل حرکتی (motion control)
همچنین در انتهای این کتاب مطالعه ای بر سیستم های سروو صنعتی و مکانیکی انجام شده است. در این مطالعه معیارهای بررسی شده نظیر نویز در رویت گر ، اغتشاش در رویت گر و عدم قطعیت در رویت گر مورد بررسی قرار می گیرد.
نمونه کار(های) بکار گرفته شده از تئوری طراحی رویت گر :