04نوامبر 2023
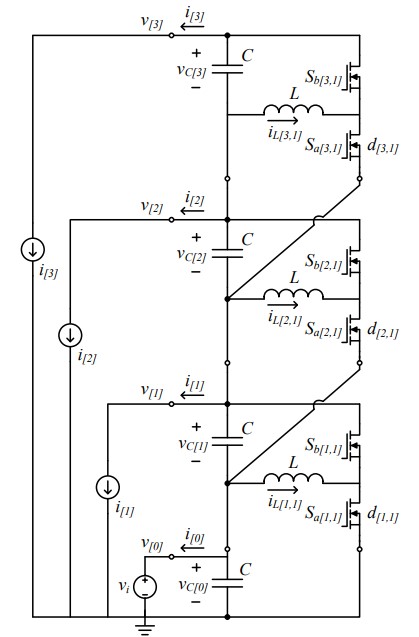
اخیراً علاقهای به گسترش شبکههای جریان مستقیم (dc) وجود داشته است که انگیزه اصلی آن افزایش منابع انرژی تجدیدپذیر، ذخیره انرژی الکتریکی و بارهای الکترونیکی است که با توان dc کار میکنند. یکی از چالشهای کلیدی که مانع پذیرش شبکههای dc میشود، فقدان توپولوژیهای مبدل dc-dc با کارایی بالا برای تطبیق تبادل انرژی ac، در […]


{kind=link}
{kind=link}