انجام پروژه های حرفه ای مهندسی برق
در این پست به معرفی یک مرجع مفید در زمینه مدلسازی و کنترل ربات پرداخته شده است. این مرجع شامل ارائه پیش نیازهای لازم جهت درک نحوه مدلسازی و همچنین اثبات پایداری در سیستم های رباتیک می باشد.
مدلسازی و کنترل ربات
به طور کلی سیستم های به هم پیوسته ای که به صورت مفاصل عمدتا دوار می باشند و توسط لینک هایی به هم اتصال می یابند، ربات نامیده می شوند. ربات ها دارای یک مدل غیرخطی می باشند. آنچه در این سیستم ها اهمیت دارند، لزوم همگامی سینماتیک و دینامیک آن ها به منظور مدلسازی و کنترل ربات می باشد. در مبحث سینماتیک ربات ها نیاز به پیش نیازهایی می باشد. این پیش نیازها عمدتا بر معادلات لاگرانژ و قواعدی نظیر دناویت-هارتنبرگ استوار است.
اما این تمام کار نیست. پس از این مرحله نیاز به بیان روابط دینامیک ربات می باشد. در دینامیک ربات، تابع انرژی (لاگرانژ) سیستم براساس انرژی های جنبشی و پتانسیل بیان می شود.

مدلسازی و کنترل ربات
فضای مفصلی و کار
همانطور که بیان شد، اساس کار در ربات بر مفاصل آن است. این مفاصل به عنوان متغیرهای یک ربات می باشند. هر کدام از متغیرهای ربات دارای دو متغیر حالت موقعیت و سرعت می باشند. مشخصا این متغیرها به ترتیب به صورت زاویه و سرعت زاویه ای مطرح می شوند. حال آنکه با استفاده از ماتریس ژاکوبین و انتگرال آن می توان به ترتیب مقادیر زاویه و سرعت زاویه ای را به موقعیت کارتزین و سرعت خطی نگاشت نمود.
مدلسازی ربات
تمامی مراحل بیان شده به طور کلی به عنوان مدلسازی ربات مطرح می باشد. مدلسازی یعنی عملیاتی که بتوان دینامیک یک ربات را استخراج کرده و ارتباط مفصلی و کاری را در آن بیان کرد. در ادامه به بیان مدلسازی و کنترل ربات و ارائه منبعی مفید جهت این امر خواهیم پرداخت.
معرفی منبع مدلسازی و کنترل ربات
در این منبع که به عنوان یک فصل از کتاب می باشد، مدلسازی و کنترل ربات به شیوه ای مناسب بیان شده است. در این کتاب مباحث زیر بیان می گردد:
- معادلات لاگرانژ : همانطور که بیان شد، روش های مختلفی برای مدلسازی یک سیستم مکانیکی نظیر ربات وجود دارد که یکی از این روش ها و معروفترینشان معادلات لاگرانژ می باشد. در این بخش دینامیک یک پاندول و ربات با دو لینک تشریح می شود.
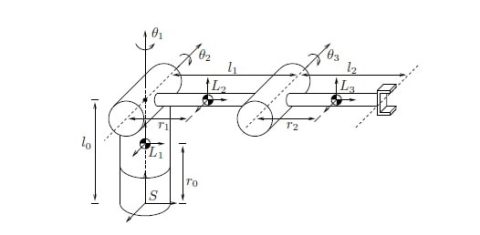
- بیان دینامیک بازوها : در این بخش با فرمول نویسی سینماتیک بازو نسبت به بیان دینامیک آن اقدام می شود. در واقع این حالت، کلیت یک سیستم را براساس جزئیات آن بیان می کند. ویژگی های ساختاری دینامیک بازوها در این قسمت بیان می شود. ویژگی هایی که در کنترل آن می تواند به کار رود. همچنین در این بخش دینامیک یک ربات با سه درجه آزادی بیان می شود.
- بیان مفاهیم ماتریس های دینامیک بازو : دینامیک کلی ربات ها دارای ماتریس هایی می باشد که معرف آن می باشد. این ماتریس ها نظیر ماتریس اینرسی ، ماتریس کوریولیس و جرم می باشد. دینامیک و اجزای داخلی ماتریس های ربات SCARA در این بخش تشریح شده است.
- تئوری پایداری لیاپانوف : به منظور اجرای مدلسازی و کنترل ربات نیاز به یک روش برای اثبات پایداری سیستم می باشد. در این بخش از کار تئوری لیاپانوف به عنوان اصلی ترین روش در اثبات پایداری سیستم های غیرخطی تشریح شده است. به این منظور مثال هایی برای معرفی بیان شده است.
- کنترل موقعیت و ردیابی مسیر : دو فرآیند کنترلی، کنترل موقعیت (position control) و ردیابی مسیر (Tracking Control) که در رباتیک کاربرد دارند، بیان شده اند. مفاهیم این دو کنترل به خوبی تفصیل شده اند.
- معرفی روش های کنترل ربات (بازو) : کنترل گشتاور محاسبه شده ربات ، کنترل PD ربات ، کنترل PD همراه با جبران ساز گرانشی و کنترل فضای کار در این بخش توضیح داده شده اند.
- کنترل همراه با محدودیت : در اکثر سیستم های رباتیک چرخش آزاد مفهوم درستی ندارد. به این معنی که بر روی میزان چرخش و یا میزان سرعت چرخش محدودیت قرار دارد. در این حالت با کنترل نوع constrained مواجه هستیم. در این بخش این نوع کنترل تشریح می شود.
برای دانلود این مرجع از لینک استفاده کنید.
نمونه کارهایی که از این منبع بهره برده اند :
کنترل ربات – روش های خطی و غیرخطی
منبع : برق تِک