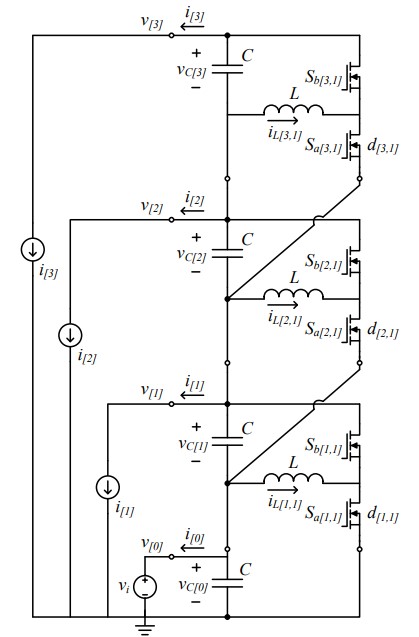
اخیراً علاقهای به گسترش شبکههای جریان مستقیم (dc) وجود داشته است که انگیزه اصلی آن افزایش منابع انرژی تجدیدپذیر، ذخیره انرژی الکتریکی و بارهای الکترونیکی است که با توان dc کار میکنند. یکی از چالشهای کلیدی که مانع پذیرش شبکههای dc میشود، فقدان توپولوژیهای مبدل dc-dc با کارایی بالا برای تطبیق تبادل انرژی ac، در […]
انجام پروژه های حرفه ای مهندسی برق
آموزش متلب
زیرمجموعه آموزش متلب شامل بخش های سیمولینک، کدنویسی و برنامه نویسی ترکیبی می باشد، در بخش سیمولینک، آموزش های مرتبط با محیط simulation متلب ارائه می گردد، اکثر شبیه سازی های قدرت در این بخش متمرکز می باشند که می توانند شامل الکترونیک قدرت، شبیه سازی سیستم های ریزشبکه، شبیه سازی منابع انرژی نو نظیر توربین های بادی، سلول خورشیدی، باتری، پیل سوختی، شبیه سازی انواع ماشین های الکتریکی و شبیه سازی سیستم های توزیع کوچک جهت مطالعات فیلتر باشد.
در بخش کدنویسی، آموزش های مرتبط با تابع نویسی و فراخوانی توابع ارائه می شود. به طور مشخص نیاز است تا دانشجویان مهندسی بتوانند در شبیه سازی های مرتبط با فرمول نویسی و یا مسائلی همچون پیاده سازی کنترل کننده ها و اجرای شبیه سازی های مرتبط با بهینه سازی، کنترل مقاوم و … نسبت به تابع نویسی در متلب اشراف داشته باشند.
نهایتا بخش برنامه نویسی ترکیبی که شامل ترکیب دو بخش بالایی می باشد، این نوع برنامه نویسی حول اهمیت اجرای برخی از بخش های شبیه سازی با کدنویسی در محیط سیمولینک می باشد. نرم افزار متلب با ارائه توابع قابل تعریف در محیط سیمولینک این امکان را به ما می دهد. دانشجویان مهندسی کنترل و قدرت می توانند از این امکان بیشترین بهره را در شبیه سازی های خود ببرند.
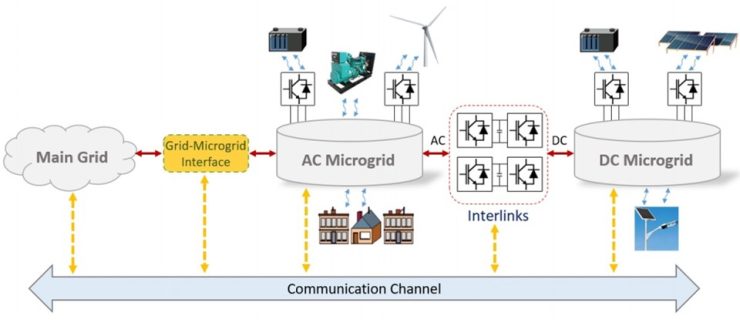
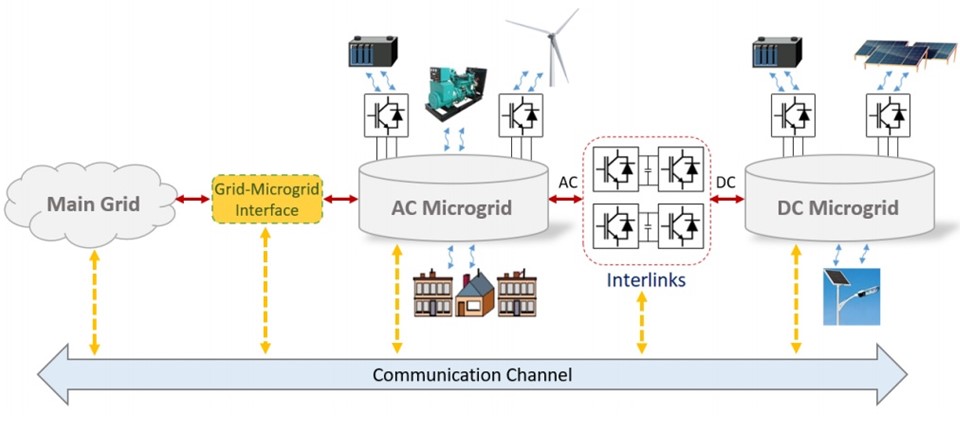
در یک نگاه ریزشبکه ها را می توان به صورت بخش هایی از شبکه انرژی در نظر گرفت که توانایی ایجاد پایداری توان در آن بدون بهره گیری از شبکه بالادست قابل دسترس است. ریزشبکه ها دارای تنوع بالایی در تشکیل ، انواع بار و مولدها و نحوه کنترل می باشند. اما آنچه مهم است […]
فضای حالت در واقع بیانگر چگونگی برهم کنش متغیرهای حالت یک سیستم نسبت به هم در طول زمان م باشد. به طور متداول این زمان از t0=0 شروع شده می تواند تا هر زمانی ادامه داشته باشد. به طور قطع می توان گفت در مدل فضای حالت سیستم تمامی نکات یک سیستم قابل استخراج است. […]
فراخوانی داده ها در متلب در اغلب برنامه های کاربردی نیاز است تا از داده هایی به عنوان منبع / source استفاده کنیم. داده های اولیه ممکن است در خود تابع یا سیمولینک تولید شده و سپس مورد استفاده قرار گیرند. ولی گاهی این داده ها از بیرون متلب به برنامه شبیه سازی انتقال می […]
ذخیره داده ها از سیمولینک ذخیره، یا ثبت اطلاعات شبیه سازی، مبنایی برای تجزیه و تحلیل و اشکال زدایی یک مدل فراهم می کند. از توابع استاندارد یا سفارشی MATLAB® برای تولید سیگنال های ورودی سیستم شبیه سازی شده و نمودار، تجزیه و تحلیل یا انجام سایر پس پردازش ها بر روی خروجی های سیستم […]
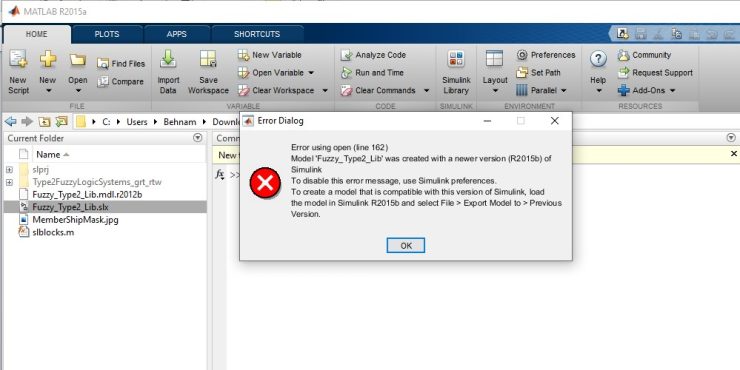
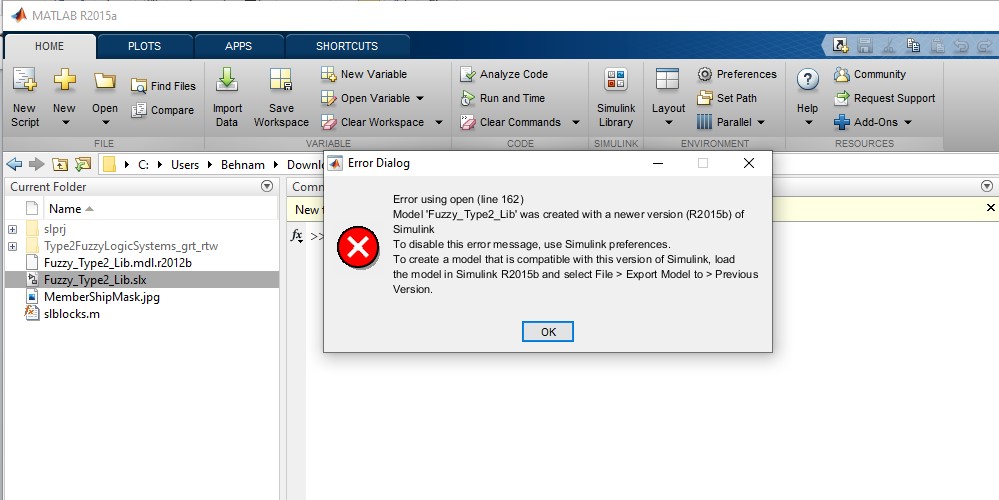
یکی از خطاهای متداول در سیمولینک متلب هنگام باز کردن یک مدل ذخیره شده با ورژن بالای متلب در یک نرم افزار متلب با ورژن پایین روی می دهد. پنجره خطا به هنگام بروز این خطا بصورت شکل زیر می باشد : شکل 1 ) تصویر خطای سیمولینک متلب مرتبط با باز کردن مدل سیمولینک […]
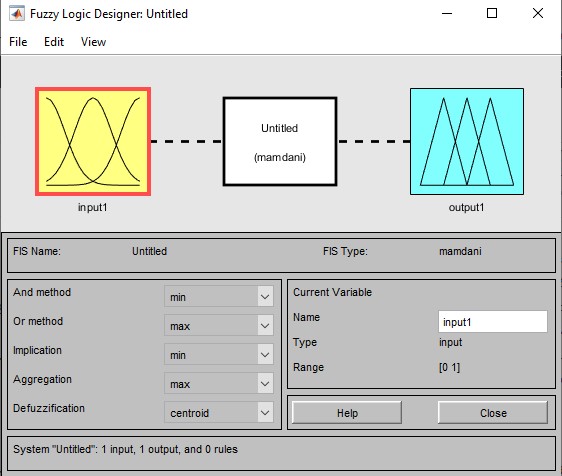
منطق فازی شکلی از منطق چند ارزشی است که در آن مقدار صدق متغیرها ممکن است هر عدد واقعی بین 0 و 1 باشد. این منطق برای مدیریت مفهوم صدق جزئی به کار می رود، جایی که مقدار صدق ممکن است بین کاملاً درست و کاملاً نادرست باشد. در مقابل، در منطق بولی، مقادیر صدق […]
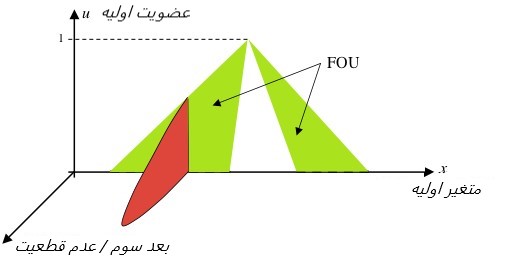
مجموعهها و سیستمهای فازی نوع ۲ (که منطق فازی تایپ 2 نیز نامیده می شود)، مجموعهها و سیستمهای فازی استاندارد نوع ۱ را تعمیم میدهند تا عدم قطعیت بیشتری را بتوان مدیریت کرد. از ابتدای مجموعههای فازی، انتقاداتی در مورد این واقعیت وجود داشت که تابع عضویت یک مجموعه فازی نوع 1 هیچ عدم قطعیتی […]
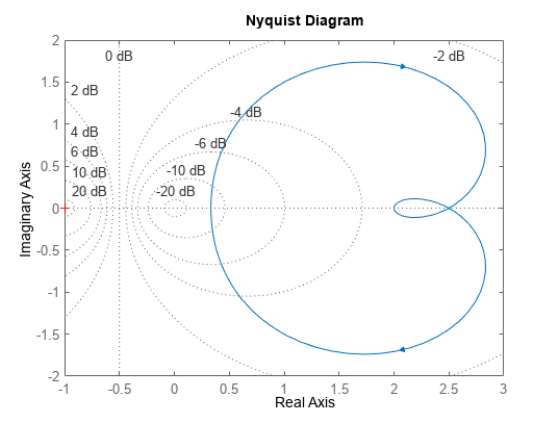
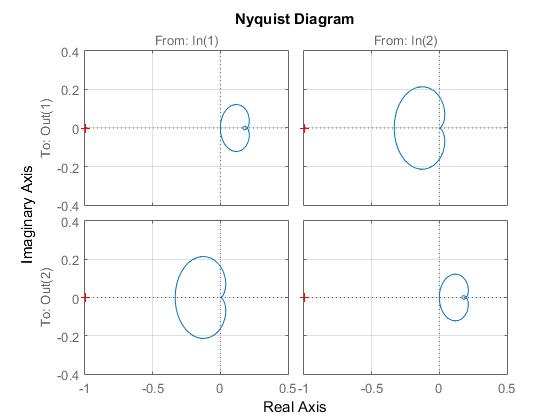
تحلیل و شبیه سازی سیستم های خطی لازمه طراحی سیستم کنترل برای هر پلنت می باشد. خوشبختانه این ابزار در حوزه کنترل خطی بسیار گسترده است. مهمترین ابزار تحلیل پایداری سیستم های خطی عبارتند از نمودار مکان هندسی ریشه ها ، نمودار بودی و نائکوئیست. که نمودار مکان هندسی براساس صفر و قطب های سیستم […]
{kind=link}
{kind=link}
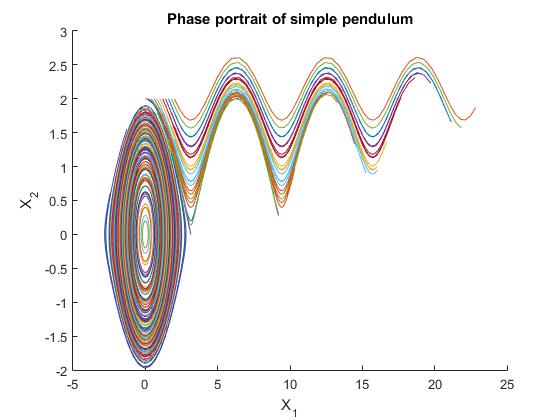
پرتره فاز نمایش هندسی مسیرهای یک سیستم دینامیکی در صفحه فاز است. هر مجموعه از شرایط اولیه با یک منحنی یا نقطه متفاوت نشان داده می شود. پرتره های فازی ابزاری ارزشمند در مطالعه سیستم های دینامیکی هستند. آنها از طرحی از مسیرهای معمولی در فضای حالت تشکیل شده اند. این اطلاعاتی مانند اینکه آیا […]